Small-scale soft-bodied robot with multimodal locomotion
2018
Article
minibot
pi
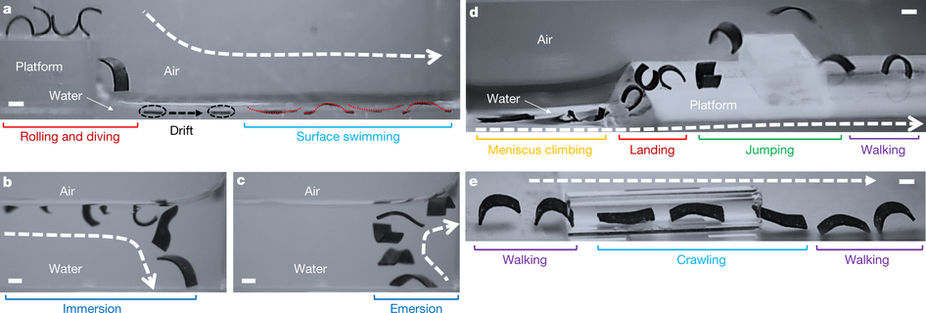
Untethered small-scale (from several millimetres down to a few micrometres in all dimensions) robots that can non-invasively access confined, enclosed spaces may enable applications in microfactories such as the construction of tissue scaffolds by robotic assembly1, in bioengineering such as single-cell manipulation and biosensing2, and in healthcare3,4,5,6 such as targeted drug delivery4 and minimally invasive surgery3,5. Existing small-scale robots, however, have very limited mobility because they are unable to negotiate obstacles and changes in texture or material in unstructured environments7,8,9,10,11,12,13. Of these small-scale robots, soft robots have greater potential to realize high mobility via multimodal locomotion, because such machines have higher degrees of freedom than their rigid counterparts14,15,16. Here we demonstrate magneto-elastic soft millimetre-scale robots that can swim inside and on the surface of liquids, climb liquid menisci, roll and walk on solid surfaces, jump over obstacles, and crawl within narrow tunnels. These robots can transit reversibly between different liquid and solid terrains, as well as switch between locomotive modes. They can additionally execute pick-and-place and cargo-release tasks. We also present theoretical models to explain how the robots move. Like the large-scale robots that can be used to study locomotion17, these soft small-scale robots could be used to study soft-bodied locomotion produced by small organisms.
| Author(s): | Hu, Wenqi and Lum, Guo Zhan and Mastrangeli, Massimo and Sitti, Metin |
| Journal: | Nature |
| Volume: | 554 |
| Pages: | 81--85 |
| Year: | 2018 |
| Month: | January |
| Day: | 24 |
| Publisher: | Nature |
| Department(s): | Bioinspired Autonomous Miniature Robots, Physical Intelligence |
| Research Project(s): |
Shape-programmable soft millirobots with multimodal adaptive locomotion
|
| Bibtex Type: | Article (article) |
| DOI: | 10.1038/nature25443 |
| URL: | https://rdcu.be/baZaD |
|
BibTex @article{Hu2018,
title = {Small-scale soft-bodied robot with multimodal locomotion},
author = {Hu, Wenqi and Lum, Guo Zhan and Mastrangeli, Massimo and Sitti, Metin},
journal = {Nature},
volume = {554},
pages = {81--85},
publisher = {Nature},
month = jan,
year = {2018},
doi = {10.1038/nature25443},
url = {https://rdcu.be/baZaD},
month_numeric = {1}
}
|
|