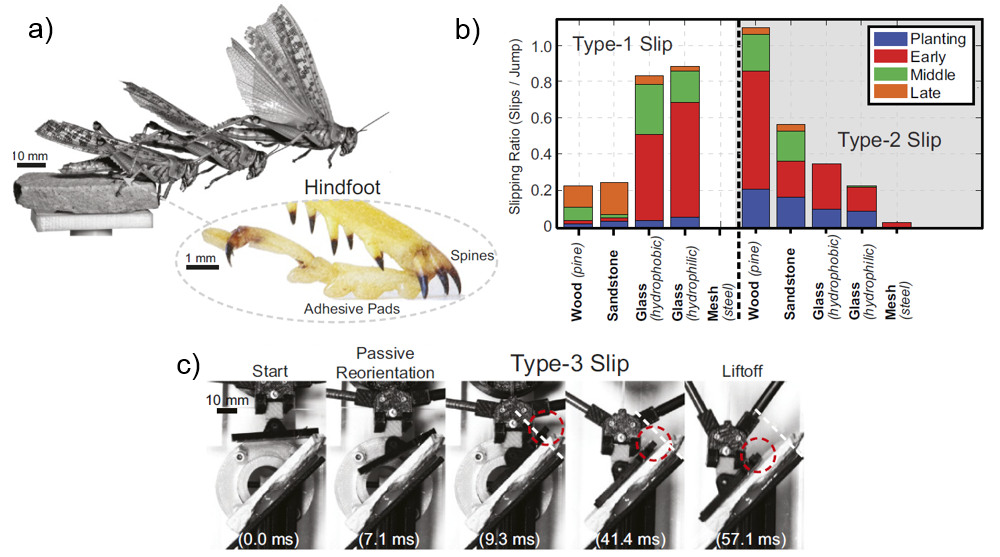
The jumping mechanism of desert locust. a) The desert locust’s (S. gregaria) jumping behavior and hindfoot. b) Locust experimental results per jump (per-leg rates are half), divided into slip type (type 1 or 2) and energy regions (planting, early, middle, or late). c) Robot noncontact jumps (sandstone), where the foot preload is zero (high-speed video snapshots).
During dynamic terrestrial locomotion, animals use complex multifunctional feet to extract friction from the environment. However, whether roboticists assume sufficient surface friction for locomotion or actively compensate for slipping, they use relatively simple point-contact feet. We seek to understand and extract the morphological adaptations of animal feet that contribute to enhancing friction on diverse surfaces, such as the desert locust (Schistocerca gregaria), which has both wet adhesive pads and spines. A buckling region in their knee to accommodate slipping, slow nerve conduction velocity (0.5–3 m/s), and an ecological pressure to enhance jumping performance for survival further suggest that the locust operates near the limits of its surface friction, but without sufficient time to actively control its feet. Therefore, all surface adaptation must be through passive mechanics (morphological intelligence), which are unknown. We report the slipping behavior, dynamic attachment, passive mechanics, and interplay between the spines and adhesive pads, studied through both biological and robotic experiments, which contribute to the locust’s ability to jump robustly from diverse surfaces [ ]. We found slipping to be surface-dependent and common (e.g., wood 1.32+/-1.19 slips per jump), yet the morphological intelligence of the feet produces a significant chance to reengage the surface (e.g., wood 1.10+/-1.13 reengagements per jump). Additionally, a discovered noncontact-type jump, further studied robotically, broadens the applicability of the morphological adaptations to both static and dynamic attachment. Our results demonstrate the potential contribution of morphological intelligence to solving complex dynamic locomotion problems. Furthermore, the concepts discovered can be easily adapted to, for the enhancement of, existing simple miniature and state-of-the-art large-legged terrestrial robots.