Pros and cons: magnetic versus optical microrobots
2020
Article
pi
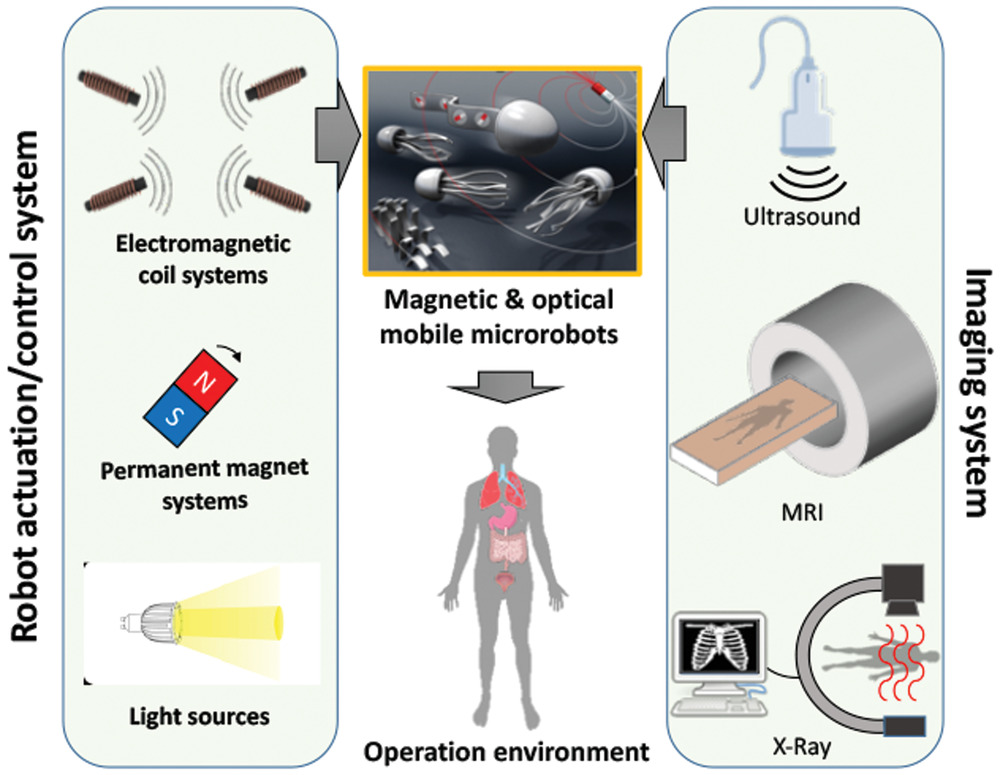
Mobile microrobotics has emerged as a new robotics field within the last decade to create untethered tiny robots that can access and operate in unprecedented, dangerous, or hard‐to‐reach small spaces noninvasively toward disruptive medical, biotechnology, desktop manufacturing, environmental remediation, and other potential applications. Magnetic and optical actuation methods are the most widely used actuation methods in mobile microrobotics currently, in addition to acoustic and biological (cell‐driven) actuation approaches. The pros and cons of these actuation methods are reported here, depending on the given context. They can both enable long‐range, fast, and precise actuation of single or a large number of microrobots in diverse environments. Magnetic actuation has unique potential for medical applications of microrobots inside nontransparent tissues at high penetration depths, while optical actuation is suitable for more biotechnology, lab‐/organ‐on‐a‐chip, and desktop manufacturing types of applications with much less surface penetration depth requirements or with transparent environments. Combining both methods in new robot designs can have a strong potential of combining the pros of both methods. There is still much progress needed in both actuation methods to realize the potential disruptive applications of mobile microrobots in real‐world conditions.
| Author(s): | Sitti, Metin and Wiersma, Diederik S |
| Journal: | Advanced Materials |
| Volume: | 32 |
| Number (issue): | 20 |
| Pages: | 1906766 |
| Year: | 2020 |
| Department(s): | Physical Intelligence |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1002/adma.201906766 |
|
BibTex @article{sitti2020pros,
title = {Pros and cons: magnetic versus optical microrobots},
author = {Sitti, Metin and Wiersma, Diederik S},
journal = {Advanced Materials},
volume = {32},
number = {20},
pages = {1906766},
year = {2020},
doi = {10.1002/adma.201906766}
}
|
|