
Underwater Snail-o-Bot gets kick from light
Light-fueled liquid crystal gels used to create robot inspired by aquatic invertebrates
- 26 February 2020
- Stuttgart
- Physical Intelligence
Researchers at the Max Planck Institute for Intelligent Systems in Stuttgart in cooperation with Tampere University in Finland developed a gel-like robot inspired by sea slugs and snails they are able to steer with light. Much like the soft body of these aquatic invertebrates, the bioinspired robot is able to deform easily inside water when exposed to this energy source. Due to specifically aligned molecules of liquid crystal gels – its building material – and illumination of specific parts of the robot, it is able to crawl, walk, jump, and swim inside water. The scientists see their research project as an inspiration for other roboticists who struggle to design untethered soft robots that are able to move freely in a fluidic environment. Such inventions could one day play a pivotal role in the research field of minimally-invasive robotic medical applications.
Stuttgart – Making an untethered soft construct that can easily change its shape and move around freely inside water is a challenging task in the research field of robotics. The majority of the known soft materials are difficult to deform in a controlled manner and to actuate efficiently due to high thermal dissipation and drag force in water.
A team of researchers in the Physical Intelligence Department at the Max-Planck-Institute for Intelligent Systems (MPI-IS), in collaboration with Prof. Arri Priimagi’s team at Tampere University aimed to solve this challenge. In the end, they found a suitable material: photo-responsive liquid crystal gels (LCGs). Such gels have never been used before in robotics, specifically in soft-bodied robotics for potential medical applications.

Both teams looked to nature and the blueprints it provides. “We studied different animals that can easily move in water,” explains Hamed Shahsavan, who is an NSERC postdoctoral researcher in the Physical Intelligence Department at the MPI-IS. “The ones that performed really well were ones that had a very soft and gel-like body. Our hero was the Spanish Dancer that can both move on the sea bed and swim away from it. But also other soft-bodied invertebrates inspired us, such as snails.”
A gel-like body as the main requirement – soon LCGs were agreed on, as they come with several advantages: Firstly, they react to light. “By using light, we can manipulate our untethered robot without any rigid and bulky on-board powering, sensing, and actuation components. Even with little energy or temperature, we can undergo a big shape change and perform different modes of locomotion,” Shahsavan continues.
The second advantage is that by arranging the gel molecules in a certain pattern, the overall construction of a few millimeters can change its shape when light illuminates specific parts of the robot (because of this targeted alignment of the gel molecules, the researchers speak of “programmable shape change”). Once the light-responsive, floppy rubber-band-like material is exposed to light, it can perform rapid and reversible shape changes: it can crawl, walk, jump, and swim. This is because LCGs reduce their density when exposed to light by 7-8%, as light makes them lighter in water. Due to the buoyancy of the illuminated parts, and with the light being turned on and off at specific intervals, the robot is actuated photothermally (see figure 1 to 3 below and watch the video).
Watch out, Snail-o-Bot is on the move!
The researchers published their work “Bioinspired underwater locomotion of light-driven liquid crystal gels” in the Proceedings of the National Academy of Sciences PNAS in February 2020. “We showed that we were able to build a robot that could do different types of motion in a fluidic environment,” says Shahsavan, the first author of the paper. “Our construction is very fast, it has low energy requirements for its actuation – 20 to 30 times less power is needed to make the same shape change compared to non-gel constructs –, and we can pre-program the shape-change due to molecular alignment. Through this, we present a solution to remotely actuate and move soft materials under water in a fast, efficient, and controlled manner. We hope to inspire other roboticists who struggle to design untethered soft robots that are able to move freely in a fluidic environment.”
Shahsavan was inspired by the evolutionary perfection of natural organisms. In the Physical Intelligence Department, there is a strong focus on a diverse range of nature-inspired robots for potential biomedical applications, such as robots steered by chemical reactions, ultrasound, magnetic fields, and now also by light. “We believe that soft-bodied robots that are able to operate in fluidic conditions and soft materials with shape-changing abilities will play a pivotal role in future medical applications and bioengineering”, says Metin Sitti, who is the Director of the Physical Intelligence Department. “We here in Stuttgart try to push the boundaries of this research field forward every day.”
While the construction of the LCG-based materials was conducted in Stuttgart, Germany, their experimental tests were conducted in Prof. Arri Priimagi’s lab, in Tampere University, Finland, in collaboration with Dr. Hao Zeng. “The extensive knowledge of Prof. Arri Priimagi’s team in light-fueled soft robots and their state-of-the-art optics and photonics facilities expedited this research,” says Shahsavan.
After several months of cooperation, their idea was put into practice: finding a material for a robot that is soft enough to work inside the body without hurting it. “In the future, we are trying to actuate this material with stimulus other than light, as it cannot penetrate through the human body,” Shahsavan concludes. “We hope that one day, we will be able to make our soft construction so small we can move and steer it with NIR light, acoustic waves, electric, or magnetic fields through the body.”
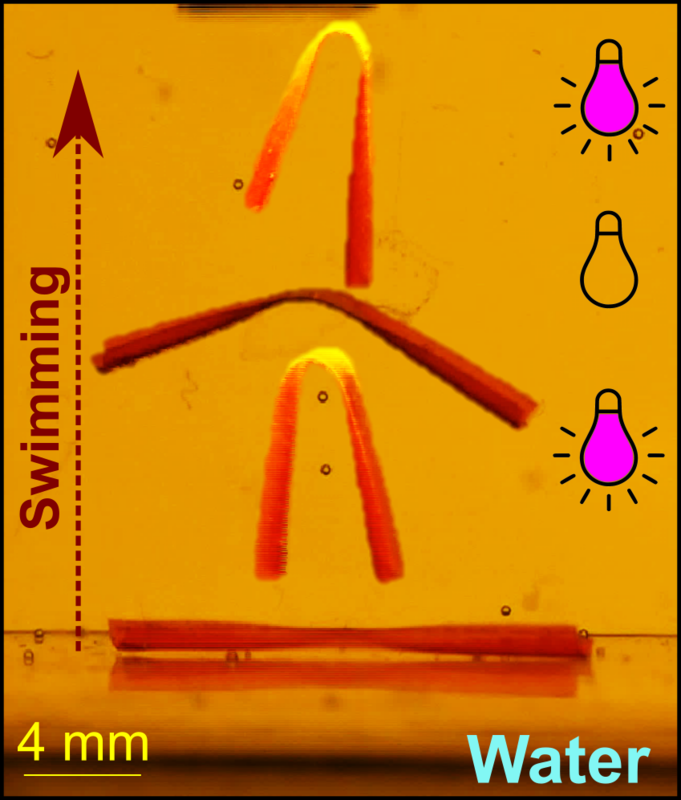
Fig.1 shows light-fueled vertical swimming of a LCG strip when it is exposed to oscillatory light exposure.
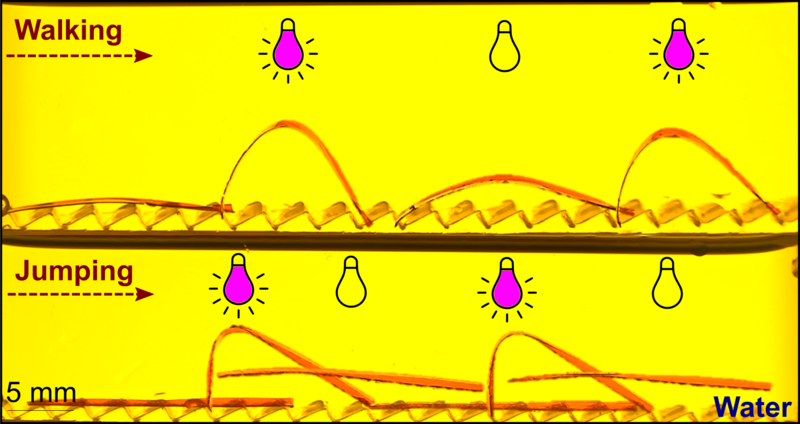
Fig. 2 top panel shows light-fueled walking and bottom shoes light-fueled jumping of a LCG strip inside water when they are exposed to selective light exposure.
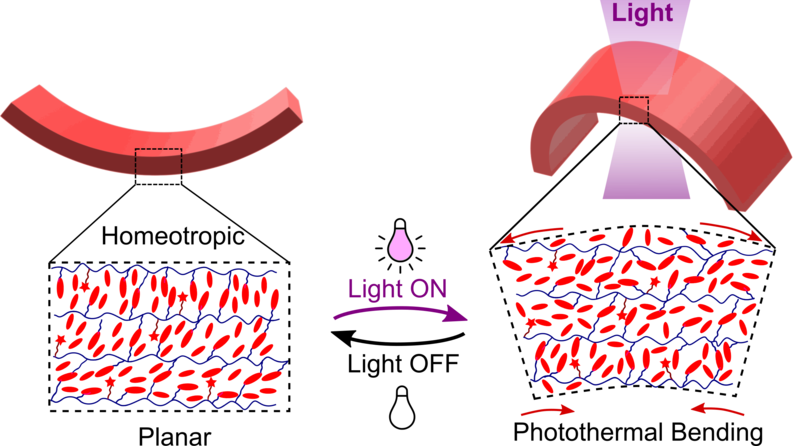
Fig. 3 shows the molecular alignment inside a LCG strip which undergoes disruption and disorder when it is exposed to the light. The light-induced disorder changes the shape of the LCG strip.
Videos
liquid crystal gels
soft-robotics
minimally-invasive
robots
metin sitti
physical intelligence
nature
Tampere University
untethered soft robot




