Series of Multilinked Caterpillar Track-type Climbing Robots
2014
Article
pi
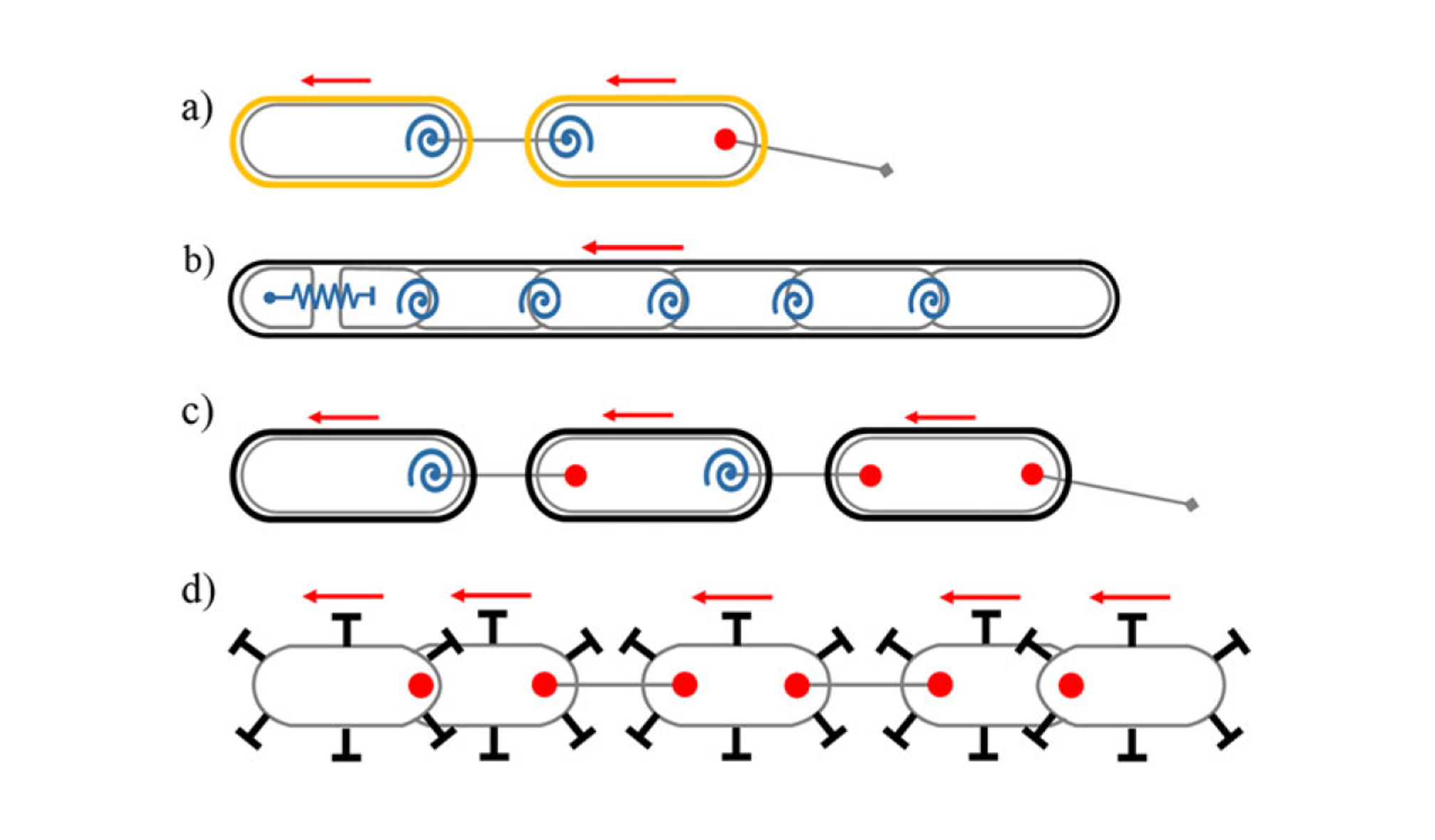
Climbing robots have been widely applied in many industries involving hard to access, dangerous, or hazardous environments to replace human workers. Climbing speed, payload capacity, the ability to overcome obstacles, and wall-to-wall transitioning are significant characteristics of climbing robots. Here, multilinked track wheel-type climbing robots are proposed to enhance these characteristics. The robots have been developed for five years in collaboration with three universities: Seoul National University, Carnegie Mellon University, and Yeungnam University. Four types of robots are presented for different applications with different surface attachment methods and mechanisms: MultiTank for indoor sites, Flexible caterpillar robot (FCR) and Combot for heavy industrial sites, and MultiTrack for high-rise buildings. The method of surface attachment is different for each robot and application, and the characteristics of the joints between links are designed as active or passive according to the requirement of a given robot. Conceptual design, practical design, and control issues of such climbing robot types are reported, and a proper choice of the attachment methods and joint type is essential for the successful multilink track wheel-type climbing robot for different surface materials, robot size, and computational costs.
| Author(s): | Lee, Giuk and Kim, Hwang and Seo, Kunchan and Kim, Jongwon and Sitti, Metin and Seo, TaeWon |
| Journal: | Journal of Field Robotics |
| Year: | 2014 |
| Month: | November |
| Day: | 7 |
| Department(s): | Physical Intelligence |
| Bibtex Type: | Article (article) |
| DOI: | 10.1002/rob.21550 |
|
BibTex @article{lee2014series,
title = {Series of Multilinked Caterpillar Track-type Climbing Robots},
author = {Lee, Giuk and Kim, Hwang and Seo, Kunchan and Kim, Jongwon and Sitti, Metin and Seo, TaeWon},
journal = {Journal of Field Robotics},
month = nov,
year = {2014},
doi = {10.1002/rob.21550},
month_numeric = {11}
}
|
|