2024
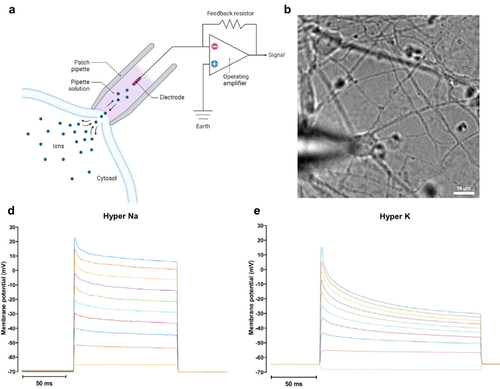
A simple quantitative model of neuromodulation, Part I: Ion flow through neural ion channels
Werneck, L., Han, M., Yildiz, E., Keip, M., Sitti, M., Ortiz, M.
Journal of the Mechanics and Physics of Solids, 182, pages: 105457, 2024 (article)
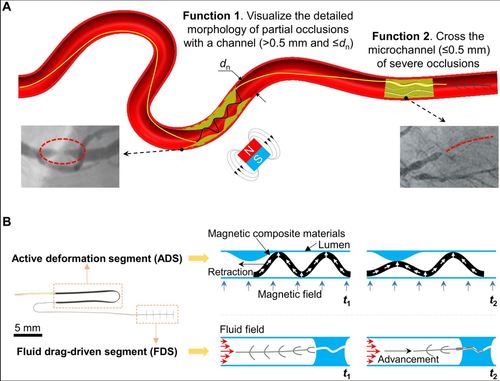
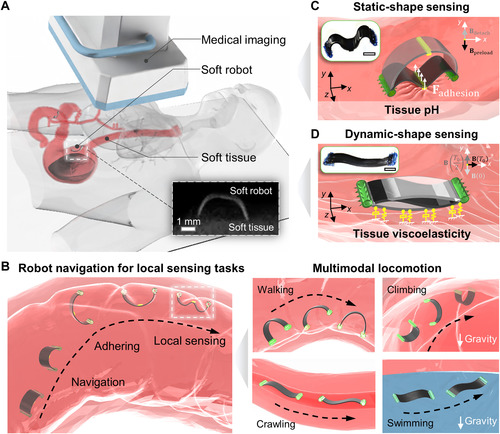
Clinical translation of wireless soft robotic medical devices
Wang, T., Wu, Y., Yildiz, E., Kanyas, S., Sitti, M.
Nature Reviews Bioengineering, 2024 (article)
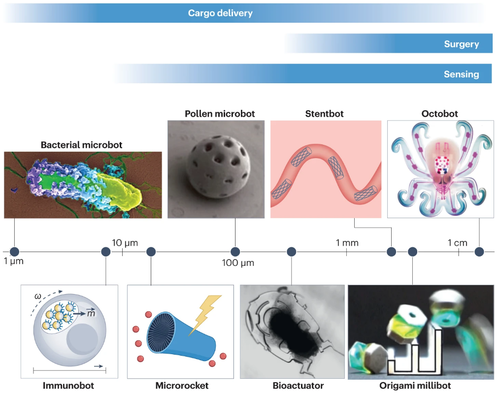
Roadmap for Clinical Translation of Mobile Microrobotics
Bozuyuk, U., Wrede, P., Yildiz, E., Sitti, M.
Advanced Materials, 2311462, 2024 (article)
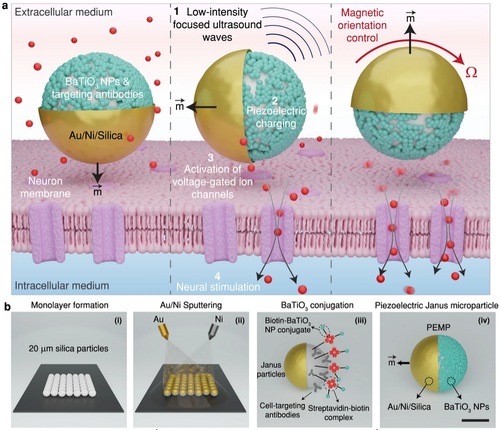
Janus microparticles-based targeted and spatially-controlled piezoelectric neural stimulation via low-intensity focused ultrasound
Han, M., Yildiz, E., Bozuyuk, U., Aydin, A., Yu, Y., Bhargava, A., Karaz, S., Sitti, M.
Nature Communications, 15(1):2013, 2024 (article)
2023
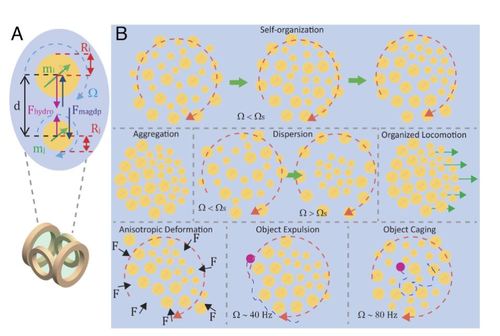
Swarming magnetic surface microrollers enable directed locomotion in circular confinements
Electrodeposited Superhydrophilic-Superhydrophobic Composites for Untethered Multi-Stimuli-Responsive Soft Millirobots
Zheng, Z., Han, J., Demir, S. O., Wang, H., Jiang, W., Liu, H., Sitti, M.
Advanced Science, pages: 2302409, June 2023 (article)
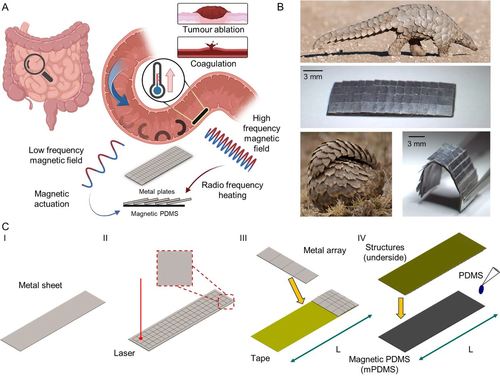
Pangolin-inspired untethered magnetic robot for on-demand biomedical heating applications
Soon, R. H., Yin, Z., Dogan, M. A., Dogan, N. O., Tiryaki, M. E., Karacakol, A. C., Aydin, A., Esmaeili-Dokht, P., Sitti, M.
Nature Communications, 14(1):3320, June 2023 (article)
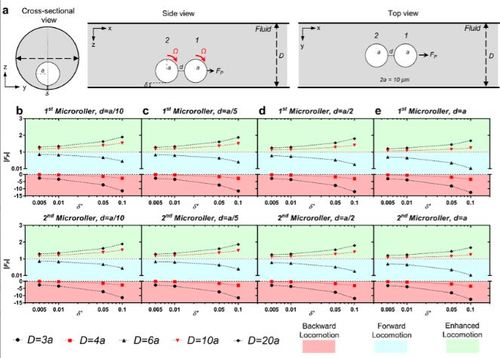
Microrobotic Locomotion in Blood Vessels: A Computational Study on the Performance of Surface Microrollers in the Cardiovascular System
The mismatch between experimental and computational fluid dynamics analyses for magnetic surface microrollers
Bozuyuk, U., Ozturk, H., Sitti, M.
Scientific Reports, 13(1):10196, June 2023 (article)
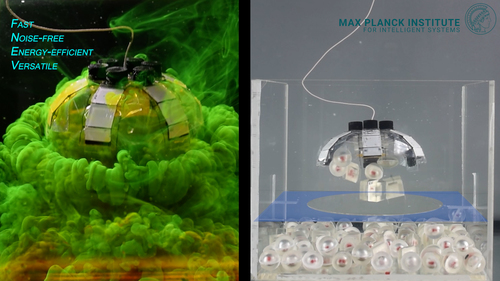
A Versatile Jellyfish-Like Robotic Platform for Effective Underwater Propulsion and Manipulation
Wang, T., Joo, H., Song, S., Hu, W., Keplinger, C., Sitti, M.
Science Advances, 9(15), American Association for the Advancement of Science, April 2023, Tianlu Wang and Hyeong-Joon Joo contributed equally to this work. (article)
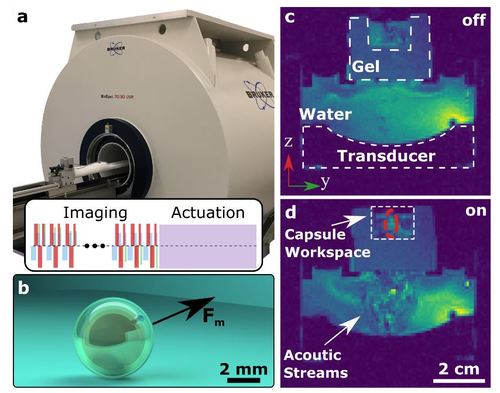
MRI-powered Magnetic Miniature Capsule Robot with HIFU-controlled On-demand Drug Delivery
Tiryaki, M. E., Dogangun, F., Dayan, C. B., Wrede, P., Sitti, M.
arXiv preprint arXiv:2301.07197, 2023 (article)
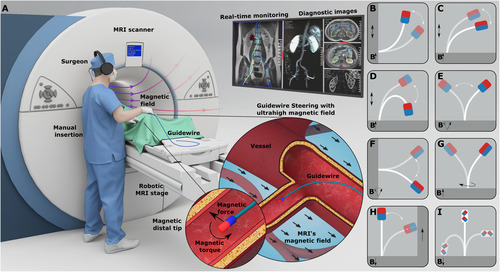
Magnetic guidewire steering at ultrahigh magnetic fields
Tiryaki, M. E., Elmacıoğlu, Y. G., Sitti, M.
Science Advances, 9(17):eadg6438, 2023 (article)
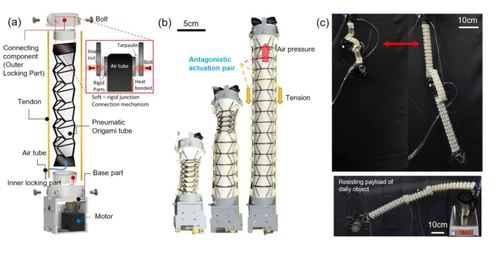
Deployable Soft Origami Modular Robotic Arm With Variable Stiffness Using Facet Buckling
Park, M., Kim, W., Yu, S., Cho, J., Kang, W., Byun, J., Jeong, U., Cho, K.
IEEE Robotics and Automation Letters, 8(2):864-871, 2023 (article)
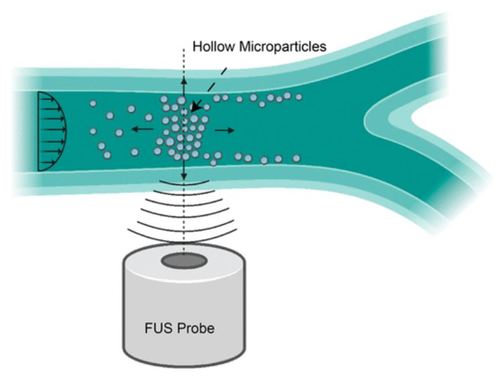
Acoustic Trapping and Manipulation of Hollow Microparticles under Fluid Flow Using a Single-Lens Focused Ultrasound Transducer
Wrede, P., Aghakhani, A., Bozuyuk, U., Yildiz, E., Sitti, M.
ACS Applied Materials \& Interfaces, 15(45):52224-52236, 2023 (article)
A ferroelectric/ferroelastic energy harvester: Load impedance and frequency effects
Kang, W., Cain, C., Paynter, R., Huber, J. E.
Energy Conversion and Management, 277, pages: 116687, 2023 (article)
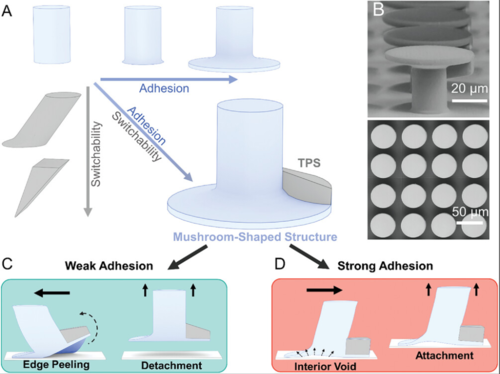
Machine Learning-Based Shear Optimal Adhesive Microstructures with Experimental Validation
Dayan, C. B., Son, D., Aghakhani, A., Wu, Y., Demir, S. O., Sitti, M.
Small, pages: 2304437, 2023 (article)
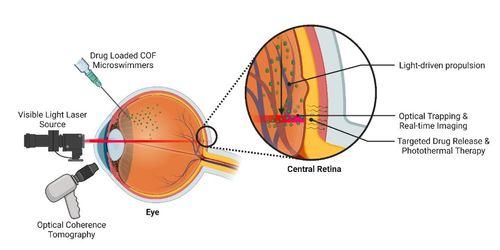
Designing Covalent Organic Framework-based Light-driven Microswimmers towards Intraocular Theranostic Applications
Sridhar, V., Yildiz, E., Rodrı́guez-Camargo, A., Lyu, X., Yao, L., Wrede, P., Aghakhani, A., Akolpoglu, M. B., Podjaski, F., Lotsch, B. V., Sitti, M.
Advanced Materials, 35, pages: 2301126, 2023 (article)
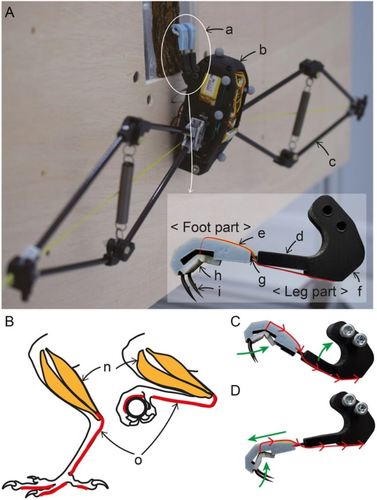
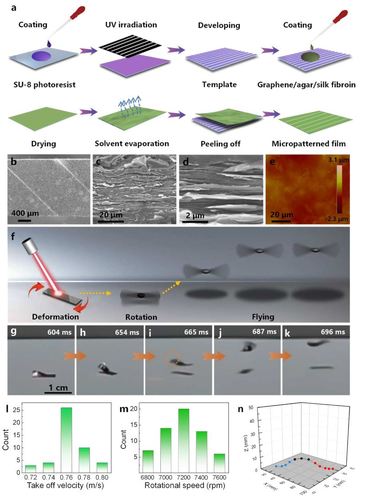
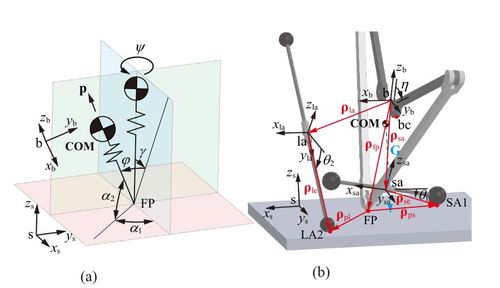
Avian-Inspired Perching Mechanism for Jumping Robots
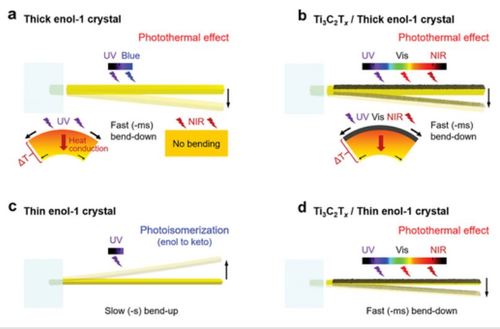
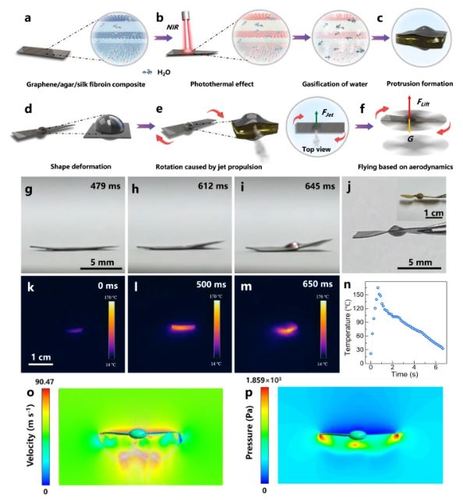
Broad-Wavelength Light-Driven High-Speed Hybrid Crystal Actuators Actuated Inside Tissue-Like Phantoms
Kim, D. W., Hagiwara, Y., Hasebe, S., Dogan, N. O., Zhang, M., Asahi, T., Koshima, H., Sitti, M.
Advanced Functional Materials, 33(47):2305916, 2023 (article)
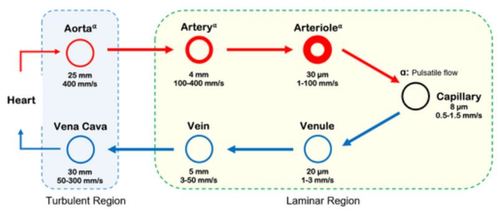
Microrobotic Locomotion in Blood Vessels: A Computational Study on the Performance of Surface Microrollers in the Cardiovascular System

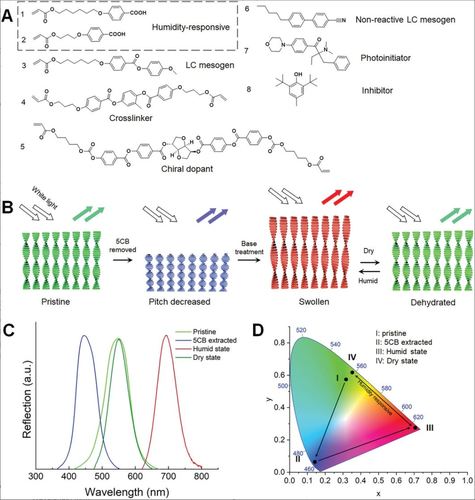
Hygroscopic Materials
Guo, S., De Wolf, S., Sitti, M., Serre, C., Tan, S. C.
Advanced Materials, 36(12):2311445, 2023 (article)
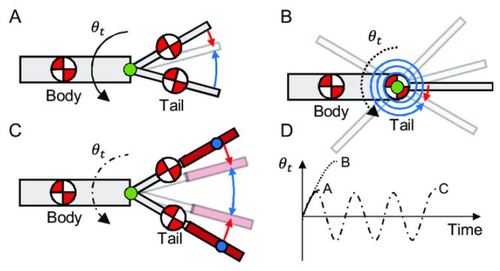
Active Tail Configurations for Enhanced Body Reorientation Performance
Acoustic Streaming-Induced Multimodal Locomotion of Bubble-Based Microrobots
Mahkam, N., Aghakhani, A., Sheehan, D., Gardi, G., Katzschmann, R., Sitti, M.
Advanced Science, 10(35):2304233, 2023 (article)
Size-Dependent Locomotion Ability of Surface Microrollers on Physiologically Relevant Microtopographical Surfaces
2022
Programmable aniso-electrodeposited modular hydrogel microrobots
Zheng, Z., Wang, H., Demir, S. O., Huang, Q., Fukuda, T., Sitti, M.
Science Advances, 8(50):eade6135, December 2022 (article)
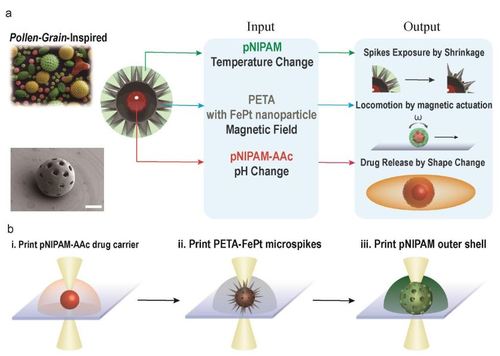
Multifunctional 3D-Printed Pollen Grain-Inspired Hydrogel Microrobots for On-Demand Anchoring and Cargo Delivery
Lee, Y., Kim, J., Bozuyuk, U., Dogan, N. O., Khan, M. T. A., Shiva, A., Wild, A., Sitti, M.
Advanced Materials, 35(10):2209812, December 2022 (article)
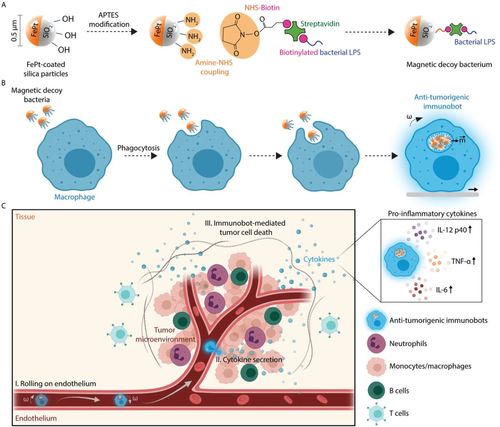
Remotely Guided Immunobots Engaged in Anti-Tumorigenic Phenotypes for Targeted Cancer Immunotherapy
Dogan, N. O., Ceylan, H., Suadiye, E., Sheehan, D., Aydin, A., Yasa, I. C., Wild, A., Richter, G., Sitti, M.
Small, 18(46):2204016, October 2022 (article)