2022
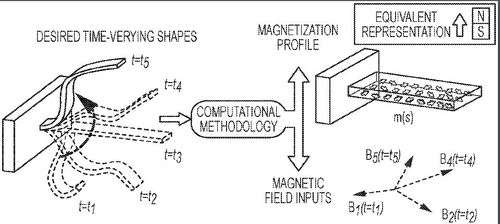
Method of fabricating a shape-changeable magnetic member, method of producing a shape changeable magnetic member and shape changeable magnetic member
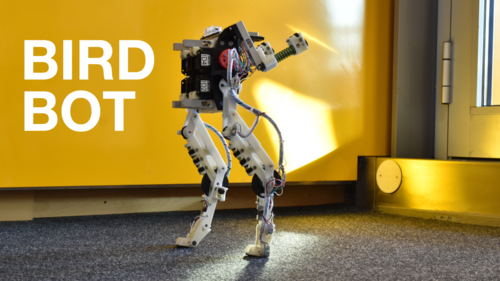
Data for BirdBot Achieves Energy-Efficient Gait with Minimal Control Using Avian-Inspired Leg Clutching
Badri-Spröwitz, A., Sarvestani, A. A., Sitti, M., Daley, M. A.
Edmond, March 2022 (techreport)
2021
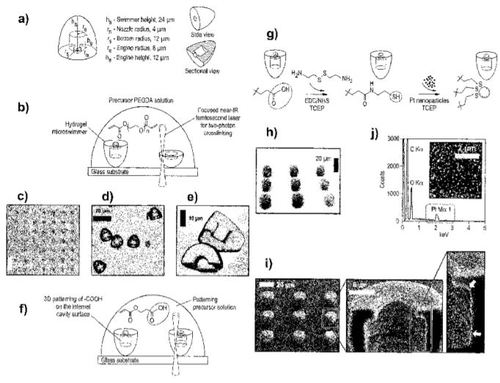
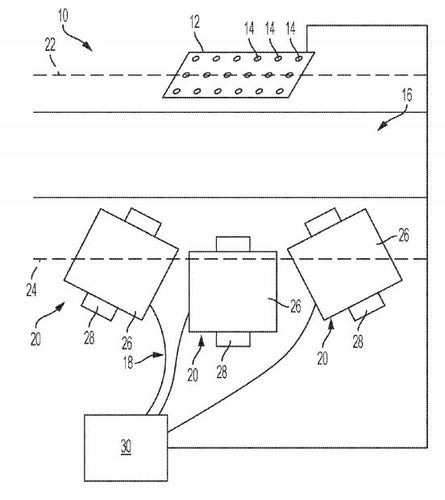
Method for producing a structure with spatial encoded functionality
Photocatalytic hydrogen evolution: interfacial engineering for improved photocatalysis in a charge storing 2D carbon nitride: melamine functionalized poly (heptazine imide)(Adv. Energy Mater. 6/2021)
Kroeger, J., Jimnez‐Solano, A., Savasci, G., Rovo, P., Moudrakovski, I., Kuester, K., Schlomberg, H., Vignolo‐Gonzalez, H. A., Duppel, V., Grunenberg, L., Dayan, C. B., Sitti, M., Podjaski, F., Ochsenfeld, C., Lotsch, B. V.
Advanced Energy Materials, 11(6):2170028, 2021 (misc)

Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril
Kirigami metastructures: liquid-crystal-elastomer-actuated reconfigurable microscale kirigami metastructures (Adv. Mater. 25/2021)
Zhang, M., Shahsavan, H., Guo, Y., Pena-Francesch, A., Zhang, Y., Sitti, M.
Advanced Materials, 33(25):2170195, 2021 (misc)

Scientific Report 2016 - 2021
Smart actuators: liquid crystal elastomer-based magnetic composite films for reconfigurable shape-morphing soft Miniature Machines (Adv. Mater. 8/2021)
Zhang, J., Guo, Y., Hu, W., Soon, R. H., Davidson, Z. S., Sitti, M.
Advanced Materials, 33(8):2170054, 2021 (misc)
2020
Simultaneous calibration method for magnetic locialization and actuation systems
2019

Scientific Report 2016 - 2018
2016
System and method to magnetically actuate a capsule endoscopic robot for diagnosis and treatment
Sitti, M., Yim, S.
2016, US Patent 9,445,711 (misc)
Remotely addressable magnetic composite micro-actuators
Sitti, M., Diller, E., Miyashita, S.
2016, US Patent 9,281,112 (misc)
2014
The design of microfibers with mushroom-shaped tips for optimal adhesion
Sitti, M., Aksak, B.
February 2014, US Patent App. 14/766,561 (misc)
Opto-thermal micro-transportation for cellular microbiology
2013
Dry adhesives and methods for making dry adhesives
Sitti, M., Kim, S.
sep 2013, US Patent App. 14/016,651 (misc)
Dry adhesives and methods for making dry adhesives
Sitti, M., Kim, S.
sep 2013, US Patent App. 14/016,683 (misc)
Dry adhesives and methods for making dry adhesives
Sitti, M., Kim, S.
sep 2013, US Patent 8,524,092 (misc)
Dry adhesives and methods of making dry adhesives
Sitti, M., Murphy, M., Aksak, B.
March 2013, US Patent App. 13/845,702 (misc)
2012
Methods, apparatuses, and systems for micromanipulation with adhesive fibrillar structures
Sitti, M., Mengüç, Y.
December 2012, US Patent App. 14/368,079 (misc)
Dry adhesive structures
Sitti, M., Murphy, M., Aksak, B.
December 2012, US Patent App. 13/533,386 (misc)
Methods of making dry adhesives
Sitti, M., Murphy, M., Aksak, B.
June 2012, US Patent 8,206,631 (misc)
Method of Molding Simple or Complex Micro and/or Nanopatterned Features on Both Planar or Non-Planar Molded Objects and Surfaces and the Molded Objects Produced Using Same
Sitti, M., Glass, P. S., Aksak, B.
April 2012, US Patent App. 14/394,172 (misc)
Dry adhesives and methods for making dry adhesives
Sitti, M., Murphy, M., Aksak, B.
March 2012, US Patent App. 13/429,621 (misc)
2011
Atomic Force Microscopy Based Nanorobotics: Modelling, Simulation, Setup Building and Experiments
Xie, H., Onal, C., Régnier, S., Sitti, M.
Springer, 2011 (misc)
2009
Biologically Inspired Polymer Microfibrillar Arrays for Mask Sealing
Cheung, E., Aksak, B., Sitti, M.
CARNEGIE-MELLON UNIV PITTSBURGH PA, 2009 (techreport)
2008
Biologically Inspired Polymer Micro-Patterned Adhesives
Cheung, E., Sitti, M.
EDGEWOOD CHEMICAL BIOLOGICAL CENTER ABERDEEN PROVING GROUND MD, 2008 (techreport)
2007
Space exploration-towards bio-inspired climbing robots
Menon, C., Murphy, M., Sitti, M., Lan, N.
INTECH Open Access Publisher, 2007 (misc)
Stickybricks: An adhesion-based modular self-reconfigurable robotic system
Schweikardt, E., Sitti, M.
2007 (misc)
2005
Adhesive microstructure and method of forming same
Fearing, R. S., Sitti, M.
March 2005, US Patent 6,872,439 (misc)