Mechanical Rubbing of Blood Clots Using Helical Robots under Ultrasound Guidance. (Talk)
- Dr. Islam S. M. Khali (Assistant Professor and Director)
- German University in Cairo / American University in Cairo, Egypt
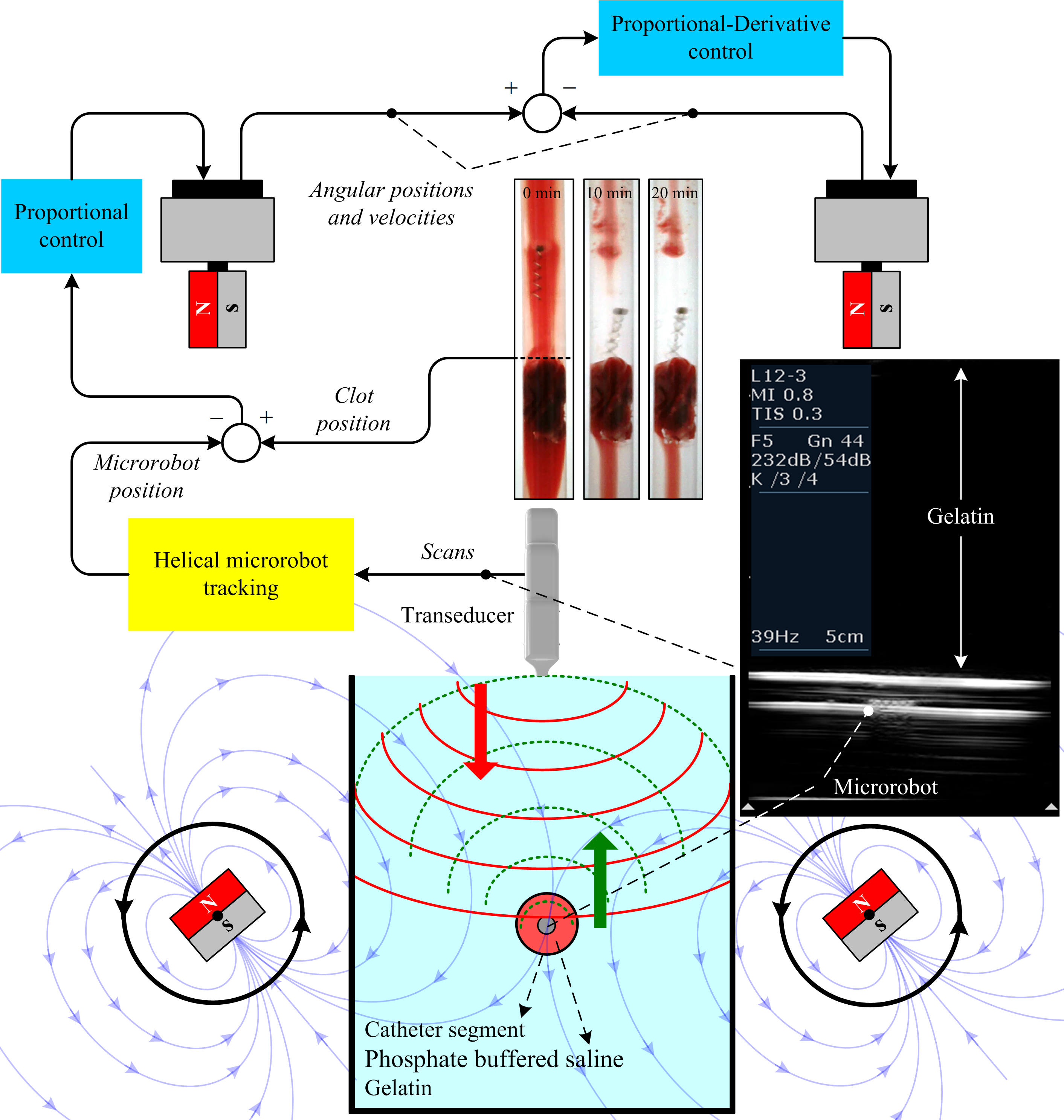
Mechanical removal of blood clots is a promising approach towards the treatment of vascular diseases caused by the pathological clot formation in the circulatory system. These clots can form and travel to deep seated regions in the circulatory system, and result in significant problems as blood flow past the clot is obstructed. A microscopi-cally small helical microrobot offers great promise in the minimally-invasive removal of these clots. These helical microrobots are powered and controlled remotely using externally-applied magnetic fields for motion in two- and three-dimensional spaces. This talk will describe the removal of blood clots in vitro using a helical robot under ultrasound guidance. The talk will briefly introduce the interactions between the helical microrobot and the fibrin network of the blood clots during its removal. It will also introduce the challenges unique to medical imaging at micro-scale, followed by the concepts and theory of the closed-loop motion control using ultrasound feedback. It will then cover the latest experimental results for helical and flagellated microrobots and their biomedical and nanotechnology applications.
Biography: Dr. Islam S. M. Khalil, Assistant Professor and Director of the Medical Micro and Nano Robotics Laboratory at the German University in Cairo, and Assistant Professor (Adjunct) in the Mechanical Engineering Department at the American University in Cairo, Egypt. Islam S. M. Khalil received the Masters and Ph.D. degrees in Mechatronics Engineering from Sabanci University. He is currently an Assistant Professor with the German University in Cairo, and directs the Medical Micro and Nano Robotics Laboratory. For three years he was a Postdoctoral Research Associate with the Robotics and Mechatronics Research Group and MIRA–Institute for Biomedical Technology and Technical Medicine, University of Twente, the Netherlands. His research interests include modeling and design of motion control systems, mechatrnoic system design, and untethered magnetic micro/nanorobotics with applications to micro / nanomanipulation, microassembly, and targeted drug delivery. Dr. Khalil received the 2009 best paper award of the International Federation of Automatic Control. Dr. Khalil has also received the Best Application paper Award at the International Conference on Manipulation, Manufacturing, and Measurement at the NanoScale, in 2015, 2016 and 2017. His work on “MagnetoSperm” at the University of Twente and the German University in Cairo in 2014 generated considerable media attention (in print, online, and radio) and more than 400 releases. He is also the associate editor of “Biologically Inspired Microrobotics” topic of Frontiers.
