As one of the core research questions of our department, we aim to understand the underlying principles of physical intelligence (PI) of single and collectives of biological organisms at milli- and micrometer length scales, and realize advanced PI capabilities on small-scale mobile robots using such principles.
At millimeter length scales with limited on-board computation, communication, control, actuation and powering capabilities at the current technological stage, PI in body becomes as important as computational intelligence (CI) in brain or body [ ]. Body PI is tightly coupled to CI in the brain or body at the millimeter and larger length scales. At micrometer length scales, current autonomous machines do not have on-board computation and powering capabilities so that PI becomes the only or main option. Therefore, for example, autonomous microswimmers need to interact with their operation environment to get their fuel or harvest energy from their environment, and sense and follow specific stimuli in their microenvironment to reach to a target location and deliver their cargos, such as drugs, using their stimuli-responsive and shape-programmable smart materials and structures.
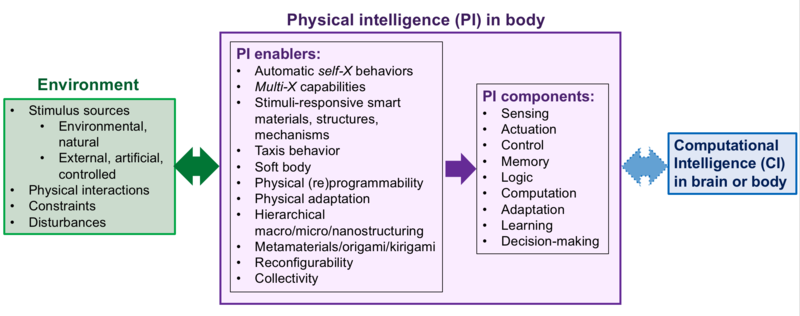

To achieve advanced PI capabilities in small-scale robots for given specific applications and tasks, there are many possible enablers and design considerations. In general, there are some key enablers that can be implemented to create advanced PI capabilities in a miniature robot:
- Encoding automatic self-X capabilities (e.g., self-adaptation, self-response, self-regulation, self-propulsion, self-healing, self-powering, self-cleaning, self-degrading, self-growing, self-replicating, self-cooling, self-oscillation, self-assembly, self-organization) in the robot body with no or minimal CI interference by integrating passive or active smart materials, structures or mechanisms.
- Encoding multi-X capabilities (e.g., multifunction, multistability, multilocomotion, multiterrain, multimodality, multiphysics) in the robot body, where the same or different material compositions, structures and mechanisms and physical forces or effects can induce multiple functions or behaviors at the same time to minimize the sensing, actuation, control and learning complexity for each specific function and behavior.
- Encoding various other advanced PI components and properties in the agent body, such as logic operations, memory, computation, decision making, reconfigurability, modularity, physical (re)programmability, physical adaptation, smart structuring (e.g., multistable structures, metamaterials, origami, kirigami, tensegrity), hierarchical multi-length scale structuring, smart mechanisms, taxis behavior and collective and emergent behavior. Such capabilities would require minimal or no CI.
For above PI approaches, possible functional smart materials for robot bodies consist of stimuli-responsive or multifunctional synthetic polymers (e.g., hydrogels, liquid crystal elastomers, shape memory polymers, soft composites, magneto-elastic materials, piezoelectric polymers), metals (e.g., shape memory alloys, liquid metals), ceramics (e.g., piezoelectric), textile fabric, biomaterials (e.g., chitosan, cellulose, gelatin, silk, proteins, cells, tissues), and micro/nanomaterials-based composites (e.g., carbon fiber composites, ferrofluids, magneto/electrorheological fluids, micro/nanoscale particle/disc/wire/fiber/tube/crystal-filled polymers).
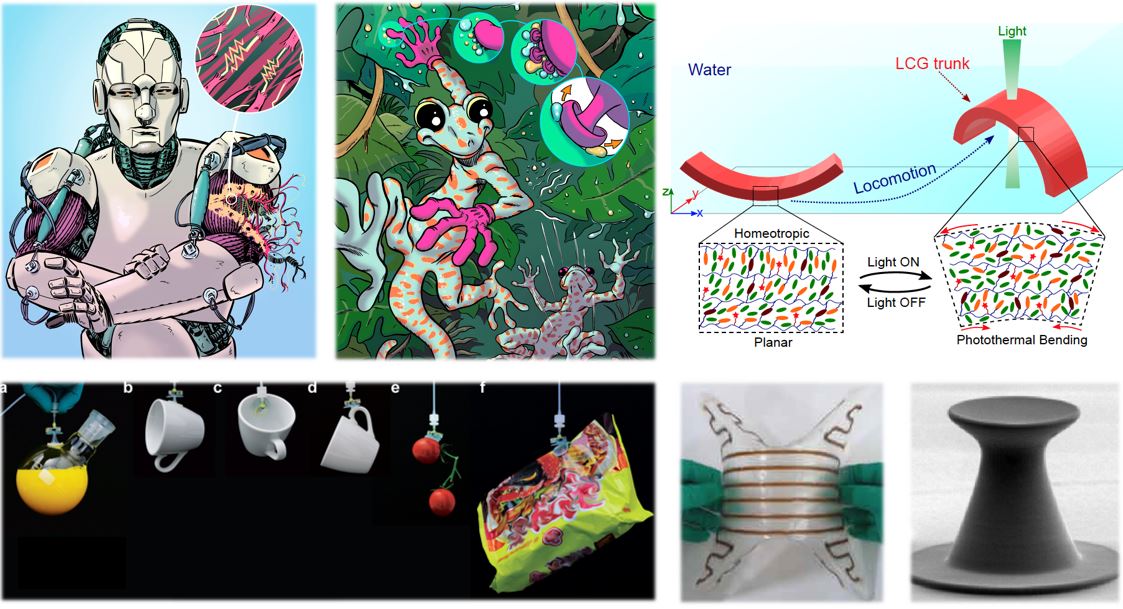
Many approaches have been proposed in our group to create PI for small-scale robots through designing the smart, adaptive and multifunctional body material compositions, structures and mechanisms. For example, we have been designing passive or active isotropic or anisotropic materials and structures in the robot body to enable self-adaptive, self-regulatory, self-degrading, self-cleaning, and other automatic behaviors. Using passive elastomeric materials, our group has pioneered elastomertic microfiber arrays-based adhesives and gripping materials inspired by biological micro-hairs on the body of animals and plants. Inspired by the biological micro-hairs, we have been designing and manufacturing elastomeric microfibers for reversible, fast, energy-efficient, compact and mechanically controlled adhesion and friction on a wide range of surfaces. We have recently optimized their three-dimensional (3D) fiber morphology for achieving maximum reversible adhesion using machine learning-based efficient optimization methods. Such surfaces can enable PI for robotic soft grippers by automatic surface 3D morphology adaptation and mechanically controlled switchable adhesion. Also, we designed such microfiber surfaces as liquid super-repellent surfaces against water, oil and all other liquids in the environment to enable self-cleaning and non-icing of the robot body surfaces. Prof. Sitti founded a startup (nanoGriptech, Inc.) in 2012 in USA, which has commercialized such gecko-inspired adhesives for a wide range of industrial and consumer applications with a brand name Setex®.
Our group has also pioneered self-healing and self-propelling protein-based soft actuators and robot materials, liquid crystal elastomers as stimuli-responsive, multifunctional, multimodal and stiffness-programmable PI materials on the robot bodies, liquid Gallium droplets behaving as a smart switchable phase-changing adhesive surfaces, and 3D-printed stiffness-programmable cellulose materials towards smart architectural surface applications as other PI examples.
























