Conventional drug delivery systems suffer from non-specific distribution of delivery agents throughout the body, resulting in low therapeutic efficiency and side effects for the treatment of diseases, such as cancer. To overcome such limitations, active therapeutic cargo delivery systems have emerged in the past decade, exploring the efficient targeting potential of such systems in biological media. Among active systems, magnetic microrobots have shown great promise thanks to their distinct advantages such as precise control capability.
Wireless magnetic microrobots possess significant potential to revolutionize the minimally invasive targeted medical applications at hard-to-reach, high-risk and deep regions inside the human body. The circulatory system is the natural fluidic transport network of the body, reaching all organs and the deepest tissues. Even though the circulatory system represents the ideal route for accessing the target disease locations, harsh physical conditions (e.g., blood flow) within the vessels impair the motion of cell-size microrobots. On the other hand, the surface motion of leukocytes, the only motile cells in the bloodstream, on vessel walls is enabled by their margination to the vessel wall and decreased flow velocities compared with the vessel centre. Therefore, vessel wall–enabled surface motion of leukocytes can be mimicked in surface-rolling microrobots for efficient propulsion in blood flow.
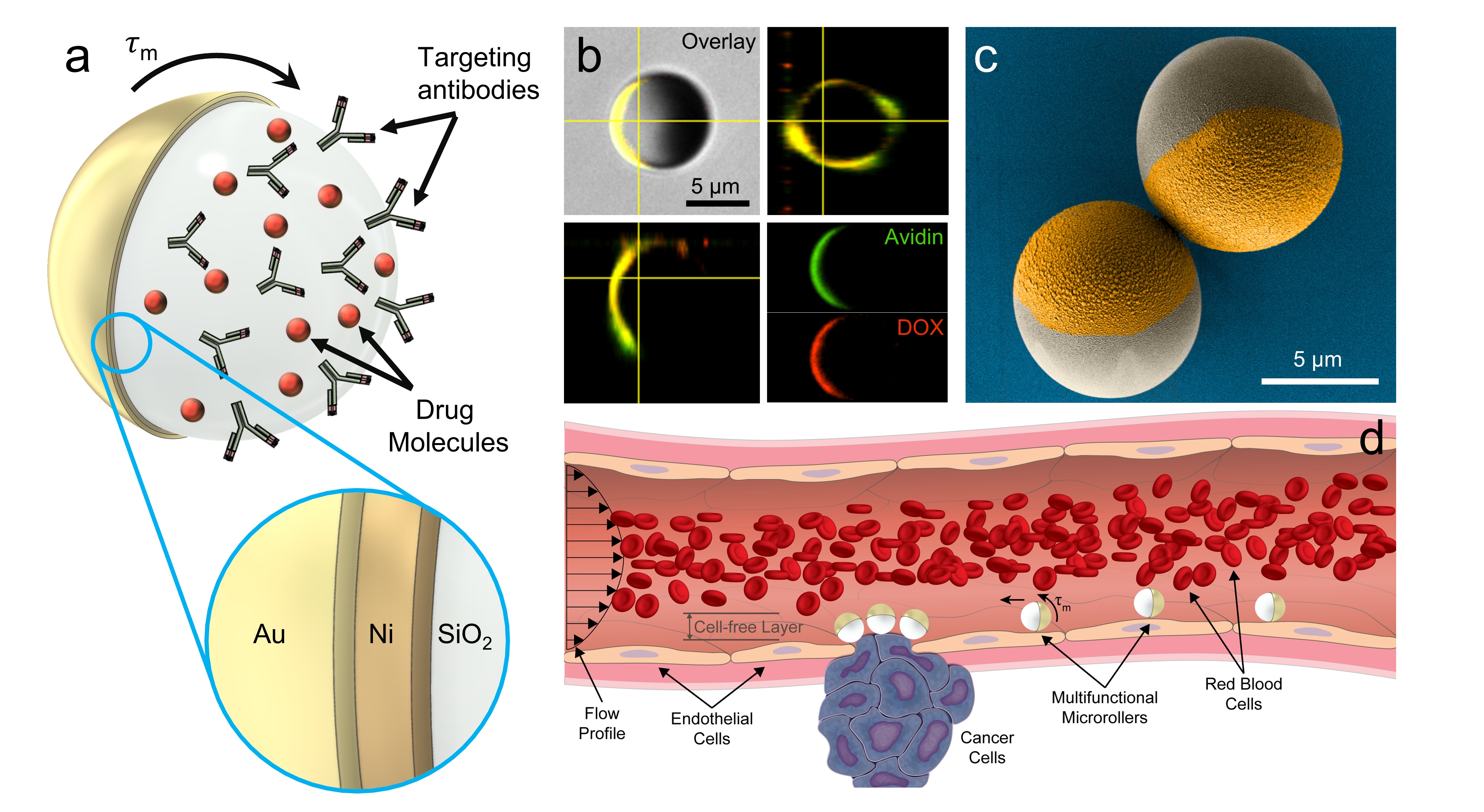
This research explores the navigation ability of magnetic surface microrollers in physiological flow conditions for future endovascular medical applications. Specifically, we explore the upstream navigation potential of the magnetic microrollers using different materials and designs, understand the biological and hydrodynamic barriers [ ] in blood vessels for efficient propulsion. We incorporate different drugs and antibodies to investigate the active targeting and delivery potential of the microrollers to the cells of interest [ ]. Other than that, the medical imaging potential of surface microrollers is also being investigated with different imaging modalities to identify suitable techniques for imaging-guided endovascular delivery applications. Overall, we explore the biological barriers in blood vessels for the locomotion of the microrollers, and aim to develop a microrobotic system that can navigate the bloodstream and perform high-impact medical interventions in realistic settings.