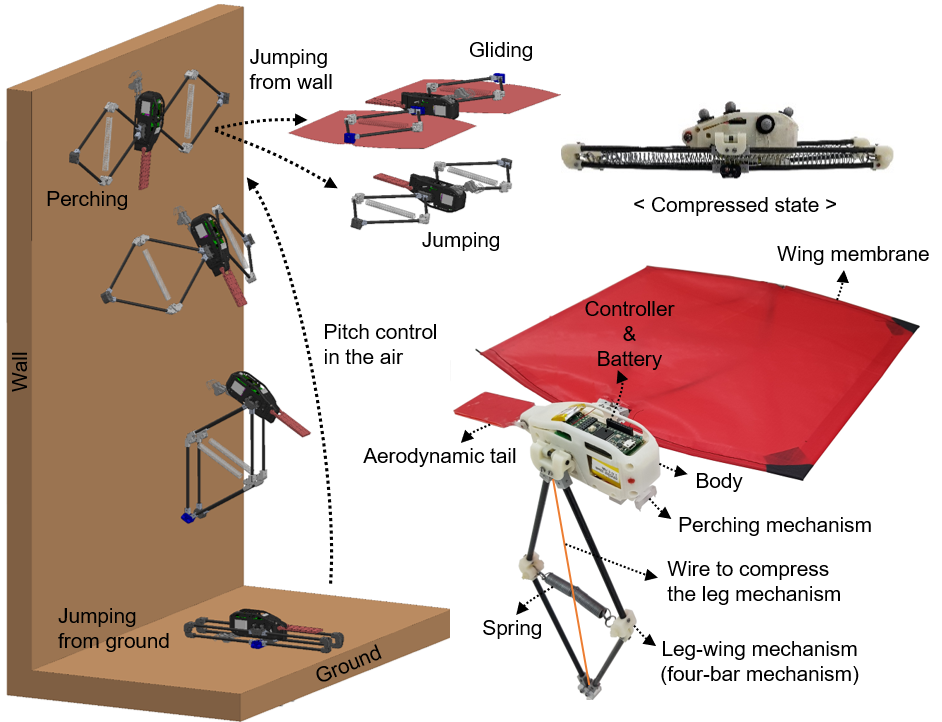
MutiMo-Bat: Multimodal robotic platform to integrate jumping, perching, and gliding motions. The jumping energy source comes from a spring in a four-bar mechanism. The robot has a clutch mechanism to store and release the jumping energy. The robot absorbs a perching shock and makes a stable engagement with the wall surface by using a claw. Wing membrane generates air drag force for the gliding motion. The aerodynamic tail controls the robot’s pitch angle in air.
Mobility in unstructured environments is a significant challenge for robotic systems; however, there are creatures capable of operation in these environments. For example, flying squirrels, frogs, and snakes can jump from trees and glide to move to other trees. Woodpeckers can fly and perch on the bark. These integrated motions provide maneuverability to avoid danger from predators or obtain food. With the correct level of abstraction, these creatures can inspire designs that can improve the performance of their robotic counterparts.
The objective of this work is to design a single robotic platform and mechanisms for the motion integration from jumping, perching, and gliding motions. The benefit of our approach is that employing multiple locomotion strategies can significantly improve the mobility of systems operating in unstructured terrain. By utilizing an integrated approach for the addition of locomotion modes, the performance of individual modes can be preserved while reducing the additional structure and actuation required, therefore, improving overall system performance. We are also investigating the importance of an active tail in such multimodal locomotion systems to improve the robot stability and maneuverability. We are also adding perching, climbing and other locomotion modes to our MultiMo-Bat platform to challenge the robot design and control further.