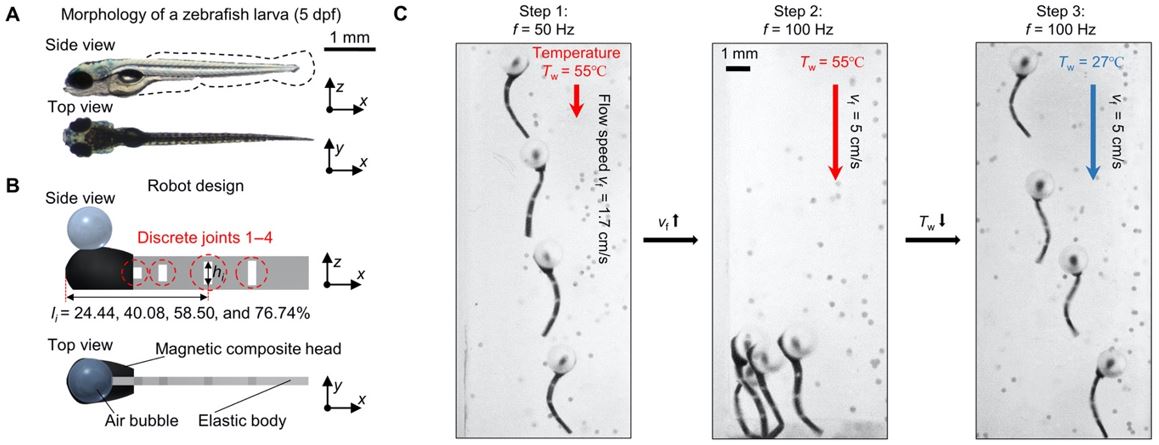
Proper combination of the body bending stiffness and actuation frequency enables the efficient undulatory propulsion in the intermediate flow regime. A, B) The robot design is inspired from the larval zebrafish and the magnetic actuation is utilized for its advantages in wireless nature, high-frequency actuation, and miniaturization. C) Together with the capability of stiffness adjustment for shape memory polymer, the efficient propulsion is demonstrated at the uniform body stiffness and high propulsion frequency.
Energy-efficient propulsion is a critical design target for robotic swimmers. Although previous studies have pointed out the importance of nonuniform body bending stiffness distribution (k) in improving the undulatory swimming efficiency of adult fish–like robots in the inertial flow regime, whether such an elastic mechanism is beneficial in the intermediate flow regime remains elusive. Hence, we develop a class of untethered soft milliswimmers consisting of a magnetic composite head and a passive elastic body with different k [ ]. These robots realize larval zebrafish–like undulatory swimming at the same scale. Investigations reveal that uniform k and high swimming frequency (60 to 100 Hz) are favorable to improve their efficiency. A shape memory polymer–based milliswimmer with tunable k on the fly confirms such findings. Such acquired knowledge can guide the design of energy-efficient leading edge–driven soft undulatory milliswimmers for future environmental and biomedical applications in the same flow regime.
As one of the most widely spread locomotion modes, undulatory swimming exists in many organisms, ranging in size from sperm cells to whales. It results from the fluid-structure interaction, which involves the influence of the muscle contraction and the interactions between the fish body and the surrounding water. This can be shown by the mismatch between the body wave’s transmission speed and the muscle contraction’s propagation speed. Particularly, the axial muscle contraction can do both positive work to bend the body and negative work to stiffen the body. The negative work part and the body’s physical properties, i.e., structural and material properties, determine the body bending stiffness distribution, k, which dictates the fluid-structure interaction. Using the proposed robotic platform in this study, we abstract and emulate a series of k configurations of larval fish-like swimming at the steady state and investigate their effects. This robotic platform can be further extended to investigate the effects of different k on biological larval fish and illustrate the importance of negative work in real larval fish swimming. This could help explain the effectiveness of their propulsion with usually higher frequencies and hint us to reexamine the roles of the homogeneously stiff notochord and the uniform body morphology on efficient undulatory swimming at the larval phase.