Department News
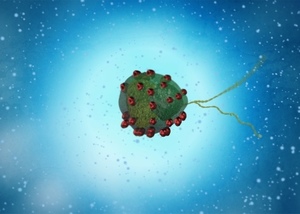
Magnetic microalgae on a mission to become robots
- 17 March 2025
Scientists at the Max Planck Institute for Intelligent Systems developed a single-cell green microalgae coated with magnetic material. This miniature robot was put to the test: would the microalgae with its magnetic coating be able to swim through narrow spaces and, additionally, in a viscous fluid that mimics those found in the human body? Would the tiny robot be able to fight its way through these difficult conditions? The team's research has now been published in the journal Matter.
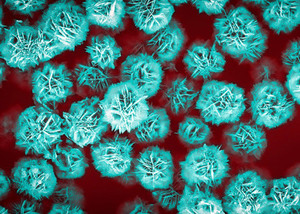
Delivering medicines with microscopic flowers
- 10 December 2024
These small particles are reminiscent of paper flowers or desert roses. Physicians can use them to guide medicines to a precise destination within the body. Better yet, the particles can easily be tracked using ultrasound as they scatter sound waves.
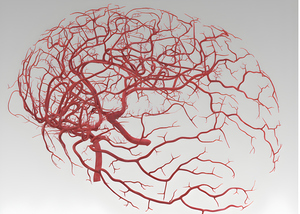
3D robot navigation could enable multi-site medical procedures
- 07 November 2024
Scientists at the Max Planck Institute for Intelligent Systems in Stuttgart, Germany, developed a novel method for deploying several magnetic miniature robots which can easily navigate through a 3D matrix resembling a network of blood vessels. This new method could one day enable the simultaneous treatment of multiple locations in hard-to-reach areas of the human body, which is currently unattainable with conventional tools. This innovative approach could significantly reduce procedure time and increase the effectiveness of minimally invasive therapies.
Chunxiang Wang Tianlu Wang Li Mingtong Rongjing Zhang Metin Sitti

Cyber Valley grants 500K to CELL’n’ROLL via 2023 Innovation Fellowship Program
- 11 April 2024
Cyber Valley Community is advancing diagnostics for the future
CELL’n’ROLL aims to develop next-generation diagnostic solutions for detecting complex diseases such as cancer.
Eine Qualle steht Modell
- 06 October 2023
Test
Sie gelten nicht als Sympathieträger der Meere, doch in puncto Unter- wasserantrieb setzen sie Maßstäbe: Nicht zuletzt weil Quallen besonders effizient schwimmen, hat ein Team des Max-Planck-Instituts für Intelligente Systeme in Stuttgart einen Roboter nach dem Vorbild der Nesseltiere konstruiert. Jellyfish-Bots könnten in Zukunft helfen, besonders empfind- liche Ökosysteme wie Korallenriffe von Plastikmüll zu befreien.
Blog: Shaping the future: Hydrogel muscles empowering advanced information encryption
- 22 August 2023
Recent research led by Professor Metin Sitti at the Physical Intelligence Department of the Max Planck Institute for Intelligent Systems has introduced an innovative strategy for achieving precise transformations of microscale metastructures actuated by hydrogel artificial muscles.
Mingchao Zhang Aniket Pal Zhiqiang Zheng Gaurav Gardi Erdost Yildiz Metin Sitti

Soft Robotic Tool provides new 'eyes' in endovascular surgery
- 18 August 2023
The magnetic device can help visualise and navigate complex and narrow spaces
Scientists at the Max Planck Institute for Intelligent Systems in Stuttgart have developed a soft robotic tool that promises to one day transform minimally invasive endovascular surgery. The two-part magnetic tool can help to visualise in real time the fine morphological details of partial vascular blockages such as stenoses, even in the narrowest and most curved vessels. It can also find its way through severe blockages such as chronic total occlusions. This tool could one day take the perception of endovascular medical devices a step further.
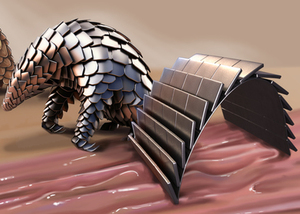
Pangolin the inspiration for medical robot
- 20 June 2023
Robot is made of metal and yet is soft and flexible
Scientists at the Max Planck Institute for Intelligent Systems in Stuttgart have developed a magnetically controlled soft medical robot with a unique, flexible structure inspired by the body of a pangolin. The robot is freely movable despite built-in hard metal components. Thus, depending on the magnetic field, it can adapt its shape to be able to move and can emit heat when needed, allowing for functionalities such as selective cargo transportation and release as well as mitigation of bleeding. The research was published in Nature Communications on 20 June 2023.
Ren Hao Soon Zhen Yin Metin Alp Dogan Nihal Olcay Dogan Mehmet Efe Tiryaki Alp Can Karacakol Asli Aydin Pouria Esmaeili-Dokht Metin Sitti
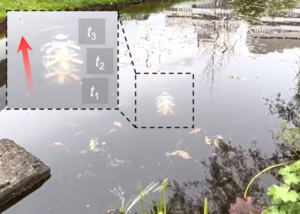
Jellyfish-like robots could one day clean up the world’s oceans
- 25 April 2023
Roboticists at the Max Planck Institute for Intelligent Systems in Stuttgart have developed a jellyfish-inspired underwater robot with which they hope one day to collect waste from the bottom of the ocean. The almost noise-free prototype can trap objects underneath its body without physical contact, thereby enabling safe interactions in delicate environments such as coral reefs. Jellyfish-Bot could become an important tool for environmental remediation.
Tianlu Wang Hyeong-Joon Joo Shanyuan Song Wenqi Hu Christoph Keplinger Metin Sitti

Birgül Akolpoglu selected to join the 72nd Lindau Nobel Laureate Meeting
- 30 March 2023
The doctoral researcher from the Physical Intelligence Department at the Max Planck Institute for Intelligent Systems in Stuttgart, is one of 635 young scientists from across the world who are given the opportunity to participate in a week of scientific exchange with some of the world’s greatest minds.