We have three focus areas in our mobile millirobotics research thrust currently. The first one is on soft-bodied millirobots with multimodal, adaptive and multifunctional locomotion in complex environments towards minimally invasive wireless soft medical robot applications. The second focus is on developing 3D microfabrication methods that can achieve unprecedented soft millirobot designs. The third focus is on design and control of bio-inspired millirobots as robotic models of the biological systems with physically intelligent body mechanisms.
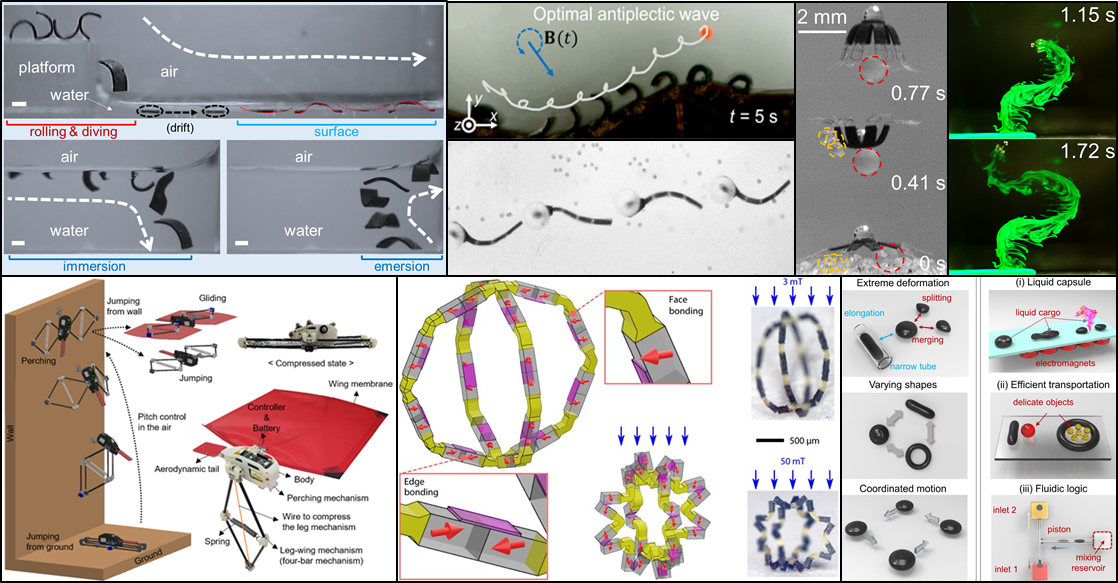
Soft-bodied mobile millirobots: Soft-bodied robots are promising as physical intelligence platforms, where their shape-programmable soft bodies can enable efficient, adaptive and multifunctional dynamics in complex confined environments. We explore a wide range of soft robot actuation methods, while our group has pioneered magnetic soft composite materials (i.e., magneto-elastomers) as soft actuators for medical applications. Inspired by soft-bodied small-scale animals, we have proposed a sheet-shaped magneto-elastic millirobot that can navigate in confined spaces with multimodal and adaptive locomotion, an ephyral jellyfish-inspired robot that can utilize the soft robot body and fluid interactions for multifunctional non-contact object manipulation and efficient propulsion, a larval fish-inspired robot that can produce adaptive body undulation for energy-efficient swimming, and an artificial cilia array that can realize highly efficient fluid transportation using metachronal waves at low Reynolds numbers. Moreover, using a probabilistic learning methods, locomotion performance of such soft millirobots is optimized for different locomotion modes and conditions.
3D fabrication of soft-bodied mobile millirobots: To realize advanced physical intelligence capabilities in our magnetic soft millirobots, we have proposed novel 3D microfabrication strategies. We have developed a heat-assisted fabrication technique that can realize high-throughput magnetic (re)programming at a high resolution, and a jig-assisted 3D assembly-based fabrication technique that can fabricate complex soft machines with multimaterials, 3D complex geometries and magnetic programming, and 3D-to-3D shape morphing capabilities.
Bio-inspired multimodal locomotion with morphological intelligence: Inspired by a vampire bat, we have developed a miniature robot that can jump and glide as a multimodal locomotion system. Next, we have investigated the desert locust to study the morphological intelligence of its feet producing a significant chance to reengage with diverse real-world surfaces. Such study demonstrates the potential contribution of physical intelligence in solving complex dynamic locomotion problems.
























