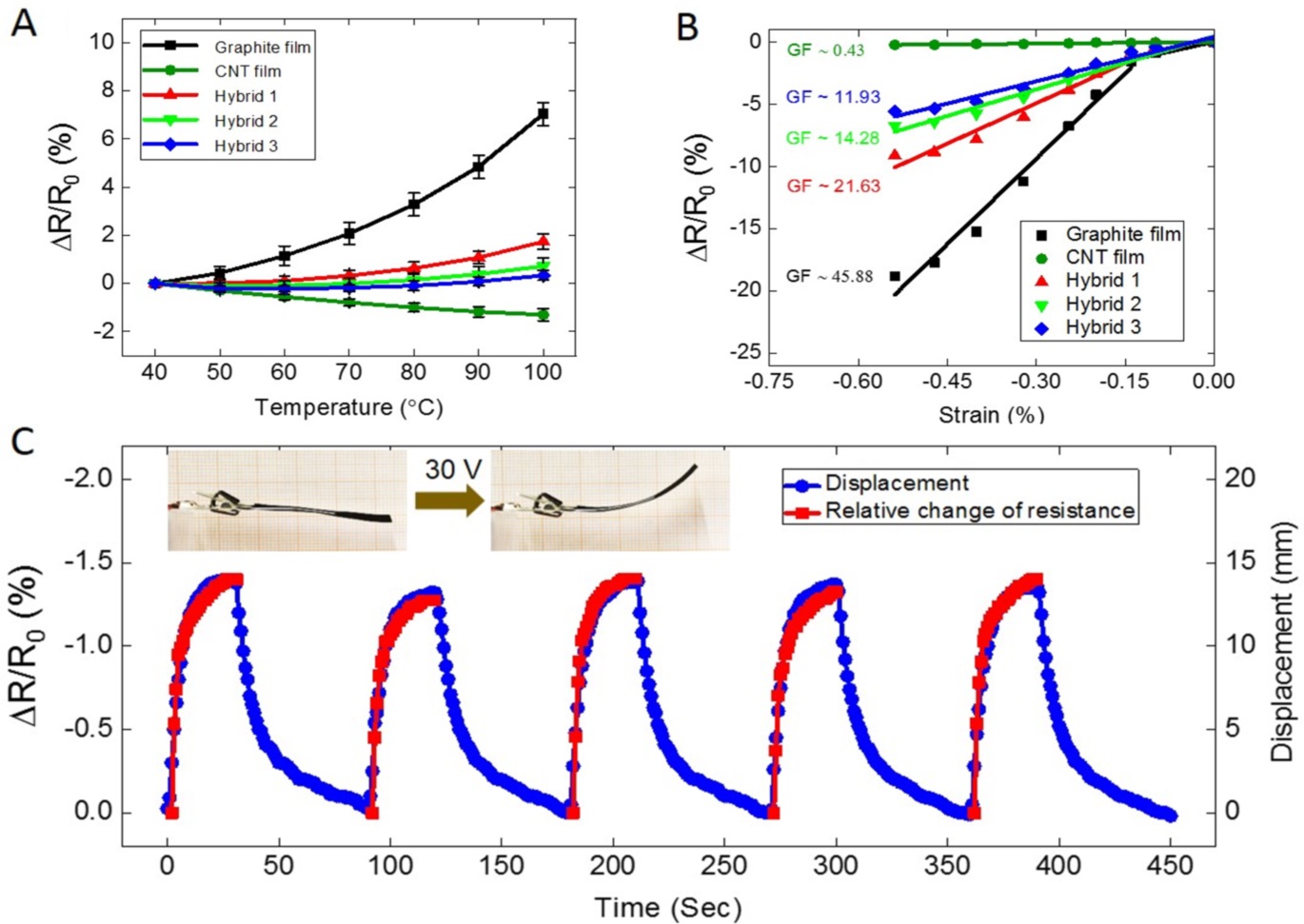
(a) Relative resistance change of graphite, carbon nanotubes, and hybrid films upon increasing the temperature. Hybrid films with varying mass ratio of graphite and carbon. (b) Piezoresistivity of graphite, carbon nanotubes, and hybrid films under compressive strain. (c) Self-sensing function of a paper actuator; insets, displacement of the actuator before and after application of 30 V.
In recent years, new emerging functional materials have considerably improved the deformation amplitude, response speed, force generation, and programmable motion output of soft actuators. Aside from efficient shape-changing behavior of soft actuators, real-time motion feedback is essential for their greater functionalities and wider adoption. To date, however, the actuation displacement is typically determined by bulky optical systems and image postprocessing, hindering effective and compact sensing capabilities of soft actuators.
In this project, we have added sensing function to our recently reported multiresponsive actuators composed of copy paper and polypropylene film. We have shown that the combination of functional materials overcomes the self-sensing limitation of current soft actuators. In this study, independent electrothermal stimulation and real-time displacement sensation have been accomplished by the hybridization of graphite microparticles and carbon nanotubes. Given nearly zero thermal coefficient of resistance (Figure a) and high piezoresistivity of hybrid films (Figure b), the signal-to-noise ratio of the proposed selfsensing actuators is significantly boosted to 66. As shown in Figure (c), relative change of the resistance matches well with the actuator tip displacement. For example, the self-sensing actuator exhibited -1.40\% resistance change for around 13.9 mm tip displacement. Thus, unlike previous integrated actuators, the dynamic motion of our actuators can be monitored merely through two input electric terminals, without any need for additional sensing components or input energies.