For adhering to 3D surfaces or objects, current adhesion systems are limited by a fundamental trade-off between 3D surface conformability and high adhesion strength. This limitation arises from the need for a soft, mechanically compliant interface, which enables conformability to non-flat and irregularly shaped surfaces but significantly reduces the interfacial fracture strength. In this research, we overcome this trade-off with an adhesion-based soft-gripping system that exhibits enhanced fracture strength without sacrificing conformability to nonplanar 3D surfaces [ ]. Composed of a gecko-inspired elastomeric micro-fibrillar adhesive membrane supported by a pressure-controlled deformable gripper body, the proposed soft-gripping system controls the bonding strength by changing its internal pressure and exploiting the mechanics of interfacial equal load sharing.
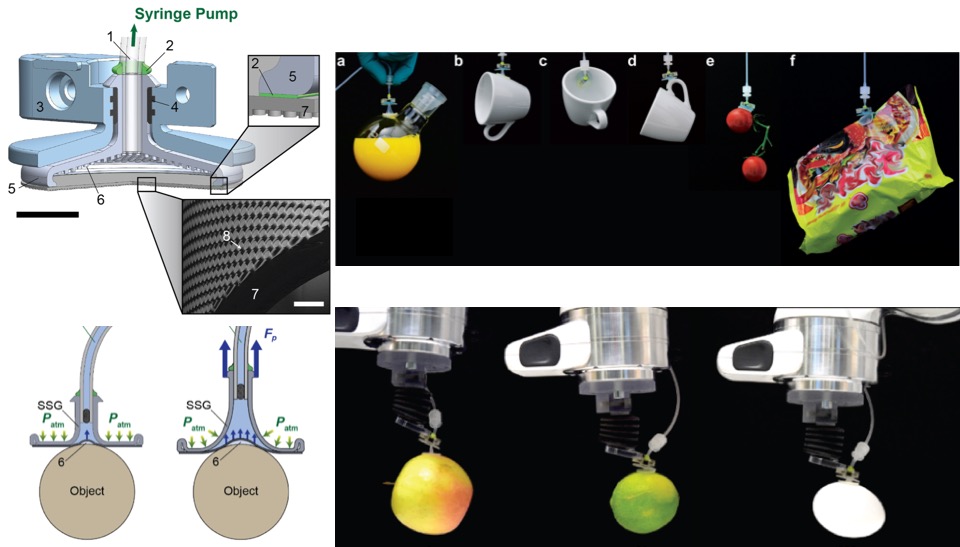
Next, we have proposed a suction-based soft robotic gripper where suction is created inside a self-sealing, highly conformable and thin flat elastic membrane contacting a given part surface [ ]. Unlike previous our works involving microfabrication or assembly of active components to improve suction performance, our soft suction gripper can be manufactured by simply attaching the membrane onto the gripper body. The proposed soft suction gripper can self-reconfigure the effective suction area without using any active components. The reconfigurability allows the soft suction gripper to achieve robust attachment to a broad range of 3D geometries with textured surfaces. We have also shown that we can 3D print such pneumatically actuated soft suction grippers with an elastomer film [ ].