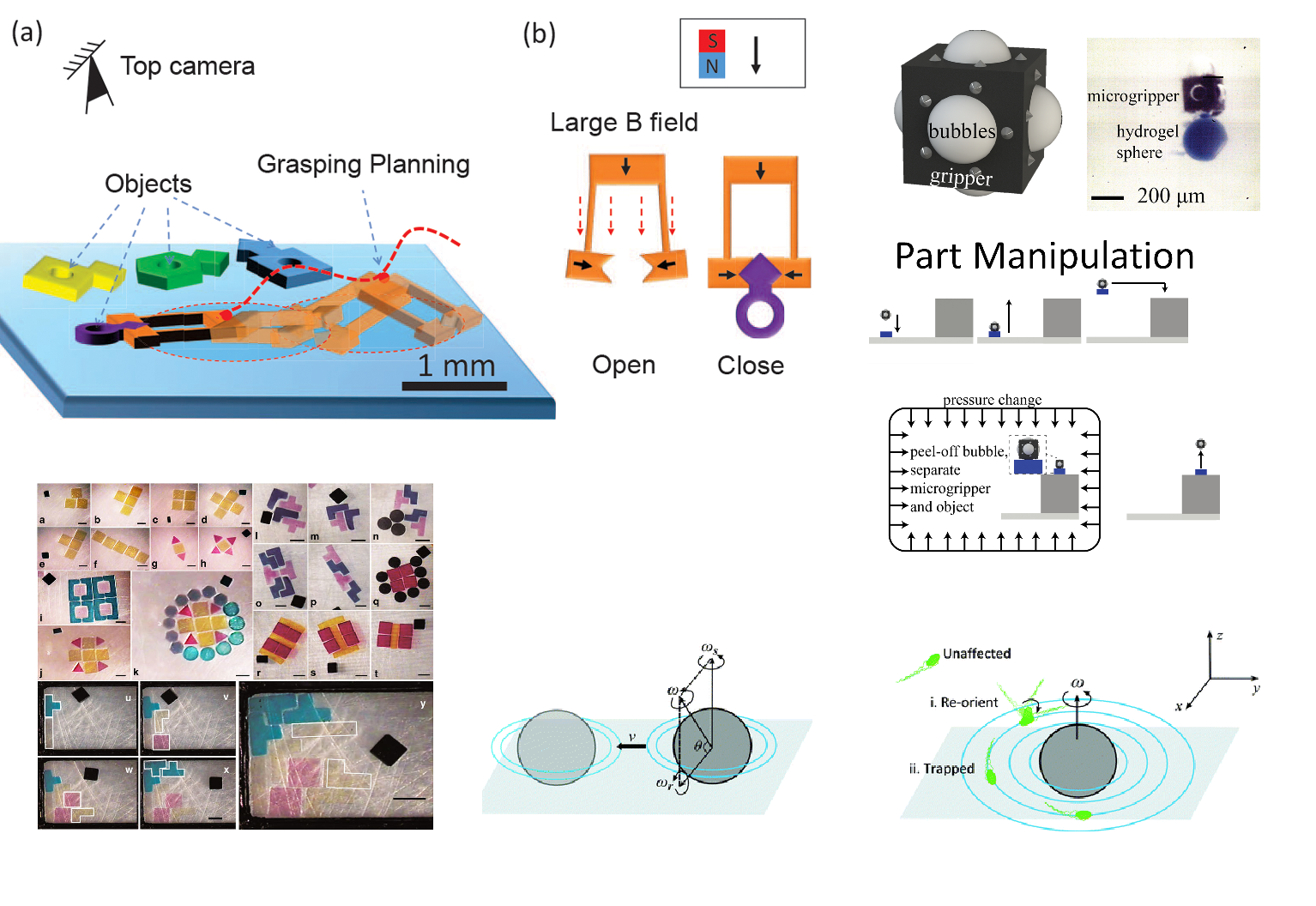
Manipulating objects at the submillimeter scale is difficult due to the dominance of surface area dependent forces (friction, drag, adhesion) over bulk forces (mass, inertia). We have investigated multiple methods to precisely pick-and-place biological materials ranging from individual bacterium to cell-laden hydrogels. We also manipulate heterogeneous components of varying shapes and materials for desktop manufacturing applications. Ongoing work continues to apply these techniques to bio-engineering applications.