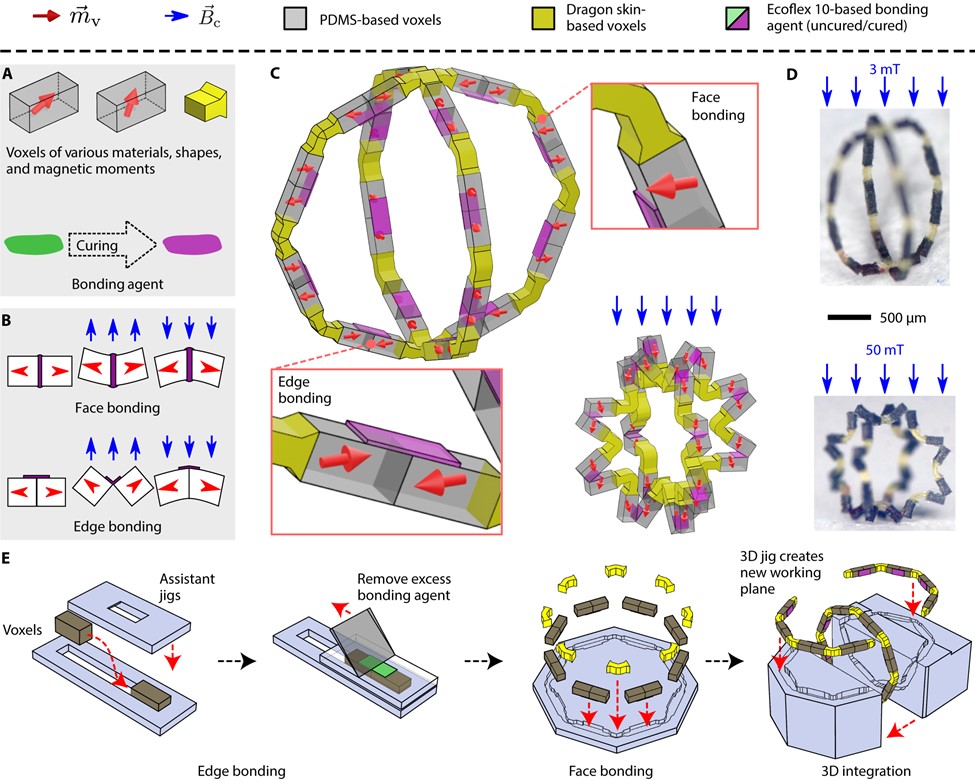
Jig-assisted 3D assembly approach for fabrication of magnetic soft millirobots. A) Voxels with different materials, shapes, and magnetization profiles are integrated together by a bonding agent. B) The bonding agent is applied to connect neighboring voxels using face and edge bonding, which respond to the external magnetic field differently. C) An assembled example soft machine with two interconnected circular rings, which experimentally shows 3D mechanical metamaterial characteristic of having a negative Poisson’s ratio D). E) Representative steps of the jig-assisted assembly process for the 3D ring.
When the size of soft-bodied machines approach the sub-millimeter scale, their designs and functionalities are severely constrained by the available fabrication methods, which only work with limited materials, geometries, and magnetization profiles. To free such constraints, we propose a jig-assisted approach to 3D assemble microscale building blocks, voxels, to fabricate soft millimachines with non-magnetic/magnetic multimaterials, 3D complex geometry and magnetic programming, and 3D-to-3D shape morphing [ ].
This proposed approach helps us concurrently realize diverse characteristics on the machines, including programmable shape morphing, negative Poisson’s ratio, complex stiffness distribution, directional joint bending, and remagnetization for shape reconfiguration. This project enlarges the machine design space and enhances the machine functionality substantially. It enables the creation of functional machines with complex designs that are tailored to specific biomedical applications, which are previously difficult to achieve, including peristaltic pumping of biological fluids and transport of solid objects, active targeted cargo transport and delivery, liquid biopsy, and reversible surface anchoring in tortuous tubular environments withstanding fluid flows, all at the sub-millimeter scale. This project advances the achievable complexity of 3D magnetic soft machines and boosts their future capabilities.