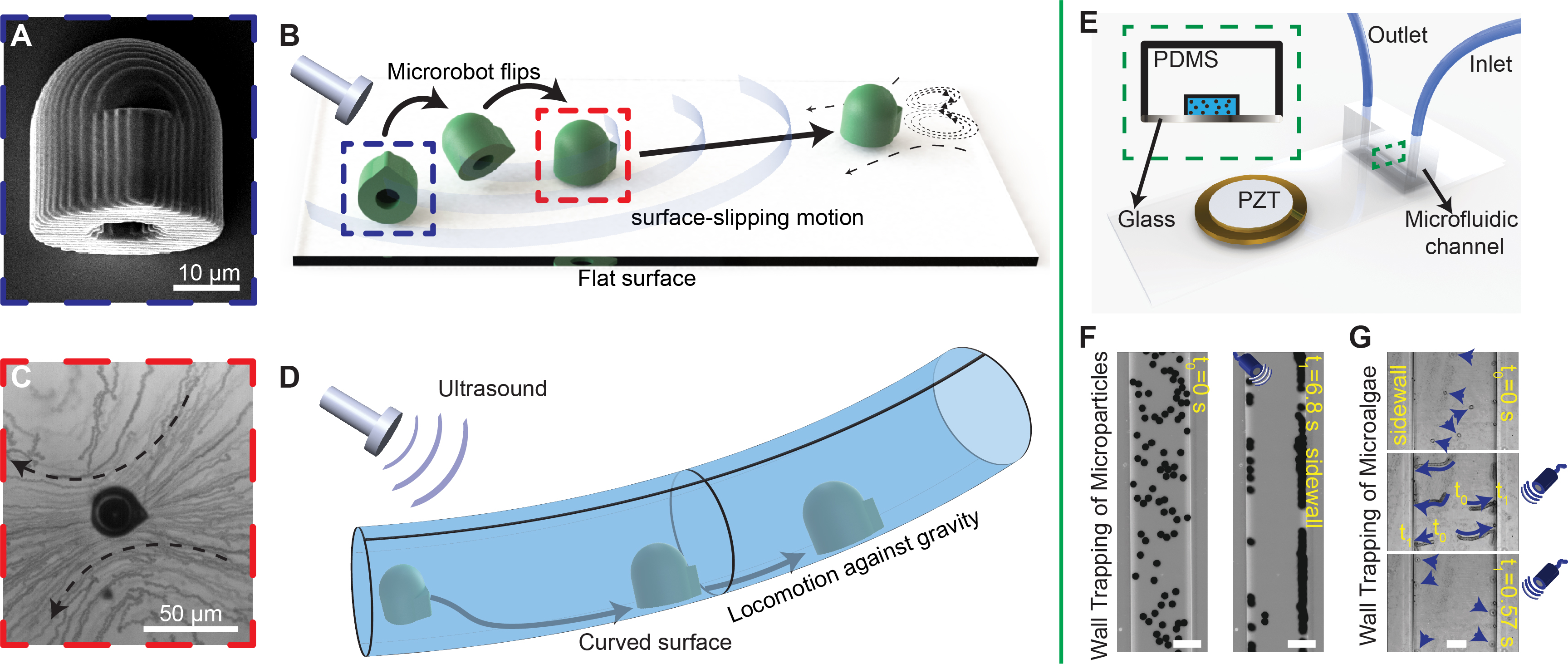
Overview of acoustically powered microrobots. A) Scanning electron microscope image of the 3D-printed microrobot. B) Locomotion mechanism of the robot under acoustic actuation. C) Microstreaming fluidic flow around the microrobot that causes the propulsion thrust. D) Propulsion of acoustic microrobots on curved surfaces. E) Schematics of the flexural wave-driven soft attractor walls. Wall trapping of F) polystyrene microparticles and G) microalgae swimmers under ultrasound waves.
We propose acoustically powered microrobots that use a fast and unidirectional locomotion strategy, termed surface slipping, and can navigate on both flat and curved surfaces [ ]. These microrobots have a 3D polymeric shell with a spherical cavity inside, whereupon immersing in fluid media an air bubble is trapped inside the cavity. By application of ultrasound waves at the resonance frequency of the bubble, the microrobot can generate asymmetric fluidic flow, leading to fast propulsion. They can harness the acoustic waves for propulsion at high speeds, up to 90 body lengths per second with a body length of about 25 µm. They can also generate a thrust force of about two to three orders of magnitude higher than that of microorganisms, such as algae and bacteria, enabling navigation inside the vascular capillaries with blood flow. For controlled steering under a uniform magnetic field, the microrobots were anisotropically coated with a magnetic nanofilm. Overall, the combination of acoustic powering and magnetic steering can be used as an efficient actuation mechanism to propel and navigate the microrobots in confined and hard-to-reach body location areas at high speeds.
Next, we reported a flexural wave-based acoustofluidic system for trapping micron-sized particles, cells, and potentially microrobots at the soft wall boundaries [ ]. By exciting a standard microscope glass slide at its resonance frequency, we showed the wall-trapping action in sub-millimeter-size channels. We demonstrated the wall-trapping performance for the case of motile cells, such as Chlamydomonas reinhardtii microalgae. The flexural wave-driven acoustofluidic system described here provides a biocompatible, versatile, and label-free approach to attract particles, cells, and microrobots toward the soft walls.