Acoustically powered surface-slipping mobile microrobots
2020
Article
pi
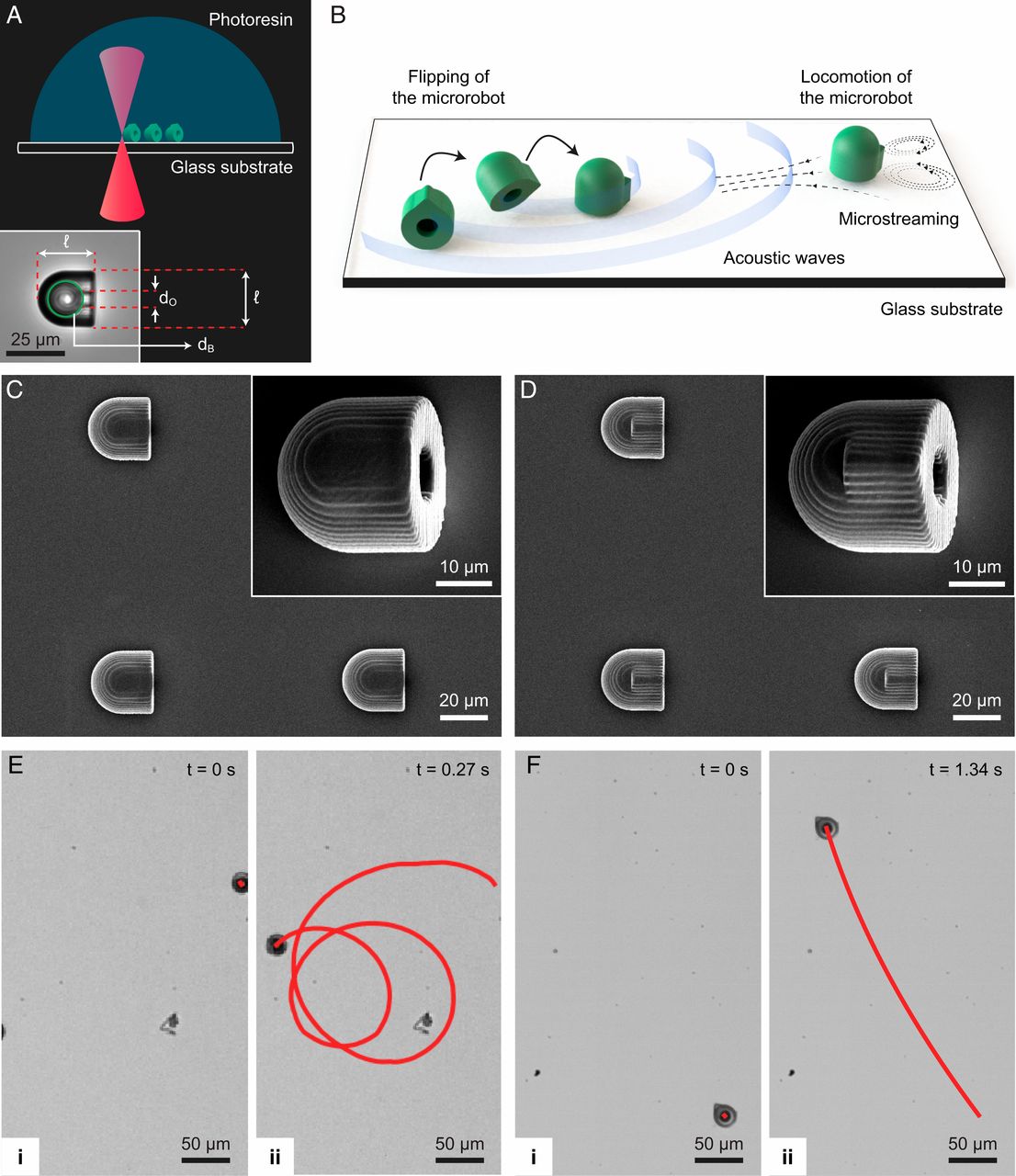
Untethered synthetic microrobots have significant potential to revolutionize minimally invasive medical interventions in the future. However, their relatively slow speed and low controllability near surfaces typically are some of the barriers standing in the way of their medical applications. Here, we introduce acoustically powered microrobots with a fast, unidirectional surface-slipping locomotion on both flat and curved surfaces. The proposed three-dimensionally printed, bullet-shaped microrobot contains a spherical air bubble trapped inside its internal body cavity, where the bubble is resonated using acoustic waves. The net fluidic flow due to the bubble oscillation orients the microrobot's axisymmetric axis perpendicular to the wall and then propels it laterally at very high speeds (up to 90 body lengths per second with a body length of 25 µm) while inducing an attractive force toward the wall. To achieve unidirectional locomotion, a small fin is added to the microrobot’s cylindrical body surface, which biases the propulsion direction. For motion direction control, the microrobots are coated anisotropically with a soft magnetic nanofilm layer, allowing steering under a uniform magnetic field. Finally, surface locomotion capability of the microrobots is demonstrated inside a three-dimensional circular cross-sectional microchannel under acoustic actuation. Overall, the combination of acoustic powering and magnetic steering can be effectively utilized to actuate and navigate these microrobots in confined and hard-to-reach body location areas in a minimally invasive fashion.
| Author(s): | Aghakhani, Amirreza and Yasa, Oncay and Wrede, Paul and Sitti, Metin |
| Journal: | Proceedings of the National Academy of Sciences |
| Volume: | 117 |
| Number (issue): | 7 |
| Pages: | 3469--3477 |
| Year: | 2020 |
| Department(s): | Physical Intelligence |
| Research Project(s): |
Acoustically-powered mobile microrobots
|
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1073/pnas.1920099117 |
|
BibTex @article{aghakhani2020acoustically,
title = {Acoustically powered surface-slipping mobile microrobots},
author = {Aghakhani, Amirreza and Yasa, Oncay and Wrede, Paul and Sitti, Metin},
journal = {Proceedings of the National Academy of Sciences},
volume = {117},
number = {7},
pages = {3469--3477},
year = {2020},
doi = {10.1073/pnas.1920099117}
}
|
|