Single mobile microrobots have limited capabilities, such as the maximum cargo volume delivered to a target location and the maximum external force output, and are impossible or very hard to image and track using medical imaging modalities. Therefore, hundreds and even thousands of microrobot collectives are essential to design, navigate, control, and implement for diverse desired functions. However, current synthetic microrobots do not have on-board autonomy individually like in macroscale robot collectives. Therefore, new microrobot collective design and control methods need to be developed. Our main approach for creating synthetic microrobot collectives with programmable functionality and tracking capability is not to control each microrobot individually, but to control the local physical interactions among the microrobots through a global control input, which could enable their programmable self-organized collective formation, navigation and functions. Such approach entails design of local attractive/repulsive interaction forces (e.g., magnetic, capillary, electrostatic and hydrodynamic) among the robots to have programmable dynamic equilibrium states with different global actuation inputs. Such cohesive robot collectives can be navigated precisely using controlled external forces (e.g., magnetic, acoustic or light), while being tracked by medical imaging modalities.
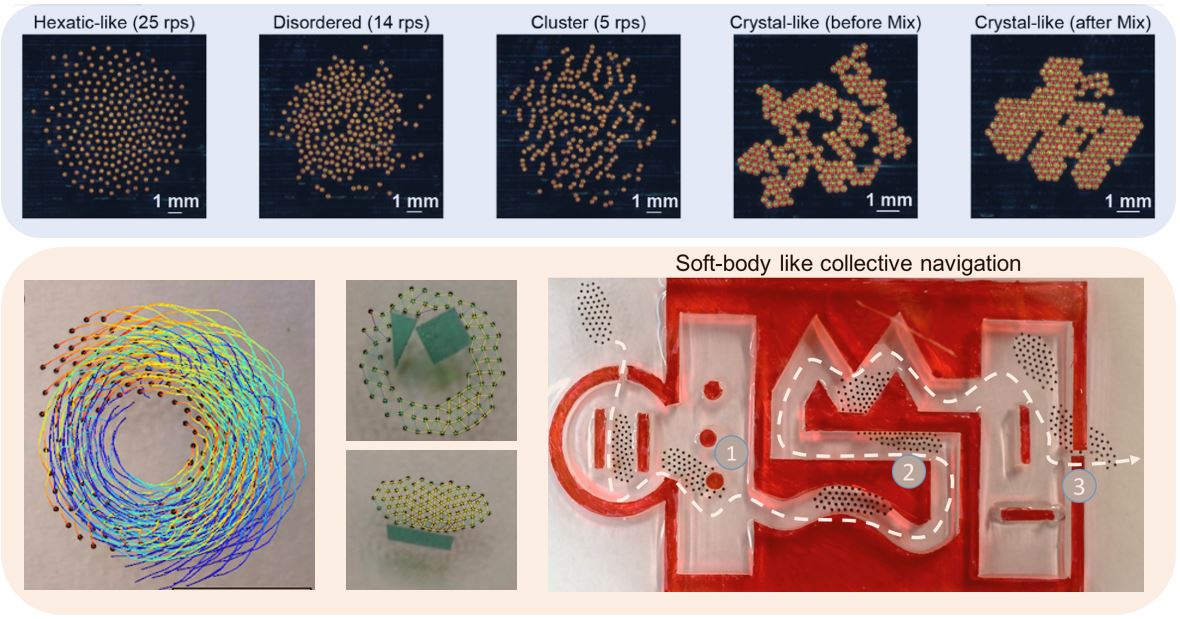
We are exploring magnetic microrobot collectives to understand how to design and control such collectives for different tasks in complex environments. As the first platform, we have designed spinning magnetic micro-rafts, which have local pairwise interactions due to attractive angle-averaged magnetic dipole-dipole forces, repulsive angle-averaged capillary forces, repulsive hydrodynamic forces, and attractive magnetic forces to draw the rafts towards an external permanent magnet’s axis of rotation. Such pairwise interactions can have different dynamic and static equilibrium states by controlling the spinning speed of the rafts globally, inducing different dynamic and static self-assembly formations. Next, external programmed permanent magnet arrays are used to induce local attractive or repulsive magnetic forces on magnetic robot collectives repelling each other at the air-water interface due to repulsive inter-magnetic forces and attracting each other due to attractive capillary forces. Such globally controlled local interactions induce different collective shape formations and move the robot collective by moving the external magnet array. Both cohesive robot formations can be navigated collectively through complex paths and manipulate large objects by programmable and reconfigurable formations and collective forces. Inside liquids, we have also demonstrated similar magnetic microrobot collectives and functions.








