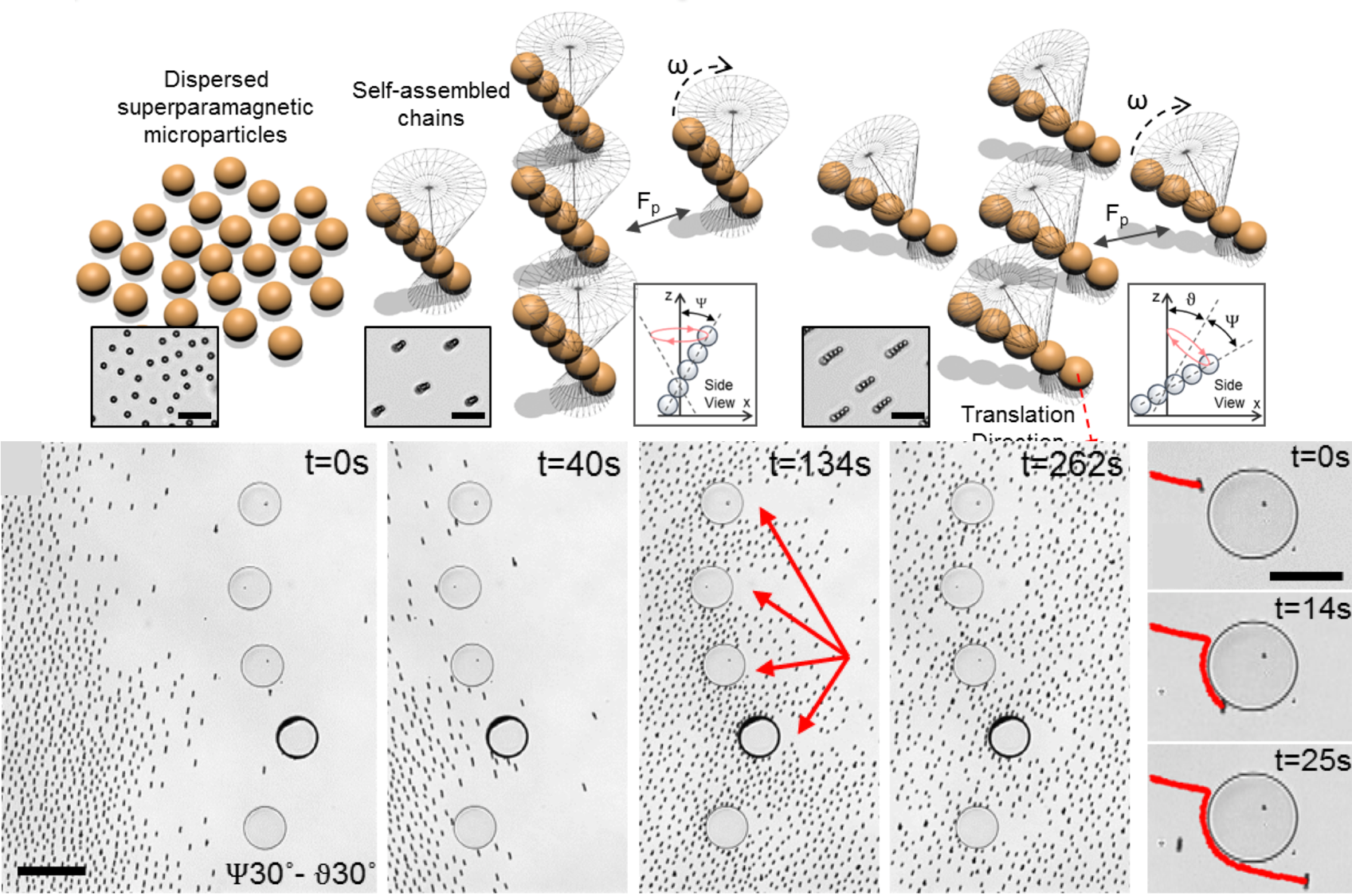
Collective control and cohesive group formation of mobile microrobotic swarms is indispensable for their potential applications in targeted drug delivery, medical diagnostics, parallel micromanipulation, and environmental sensing and remediation. Without integrated electronics for sensing and actuation, current microrobotic systems should rely on physical interactions among individual microrobots for local communication and cooperation. In this project, we have shown that mobile microrobotic swarms with well-defined collective behavior and self-organization can be designed by engineering magnetic interactions among individual units. Microrobots, dynamically self-assembled from magnetic microparticles into linear chains, locomote on surfaces in response to a precessing magnetic field. Control over precessing magnetic field allows engineering attractive and repulsive interactions among microrobots and, thus, collective order with well-defined spatial organization and stable parallel operation over macroscale distances (around 1 cm) and through confining obstacles. We further found that a balance of magnetic dipolar attraction and multipolar repulsion between self-assembled particle chain microrobots enables their self-organization into cohesive clusters. Clustering is promoted by the strength of cohesive interactions and is hindered by the heterogeneities of individual microrobots. The design approaches described in this project addresses programmable assembly, propulsion, and collective behavior of dense mobile microrobot swarms simultaneously by engineering magnetic interactions and dynamic actuation of microrobots. The presented approach will advance swarm microrobotics by enabling facile and rapid formation of self-organized and reconfigurable microrobotic swarms with programmable collective order and stability.