
Main scientific mission of the Physical Intelligence Department is to understand the underlying principles of design, locomotion, control and physical intelligence of single and collectives of small scale-mobile robots made of multifunctional smart materials, structures and mechanisms. Since tiny wireless robots are inherently limited in on-board computation, actuation, powering, perception and control capabilities, their intelligence dominantly or completely comes from their body and collective physical intelligence. Therefore, our group is investigating new methods to create advanced physical intelligence capabilities in small-scale mobile robots using various design approaches, such as bioinspired (inspired by small-scale biological organisms), biohybrid (integrated with live biological cells or biomaterials) and fully abstract and synthetic design methods. As our societal mission and translational research focus, we aim to use these tiny robots as minimally invasive and implantable wireless medical robots inside our body to revolutionize medicine and healthcare. Such miniature medical robots would improve the quality of our life and save more lives of patients.
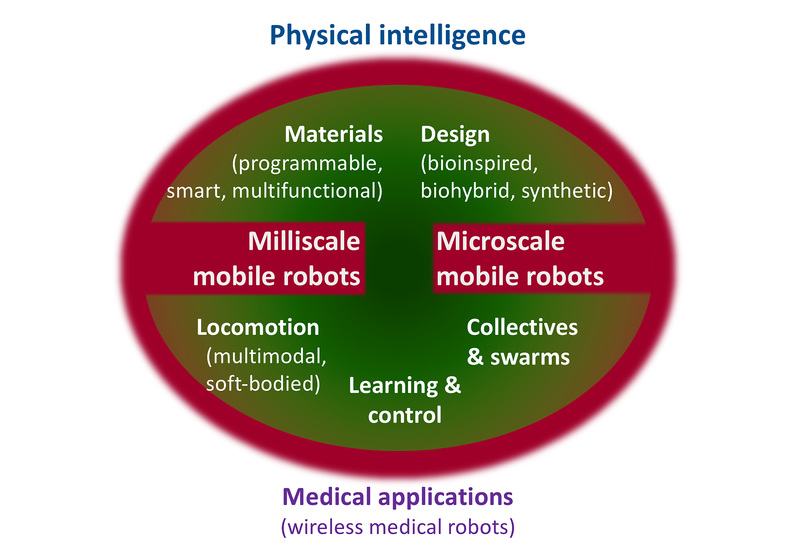
Our department has five main research thrusts currently to create new physical intelligence platforms at the small scale to understand them in detail and realize and implement them on novel milli- and micronscale mobile robots towards minimally invasive medical applications inside the human body. First, we investigate new physical intelligence methods using passive and active (stimuli-responsive) multifunctional material compositions, structures and mechanisms. Second, we study design, fabrication, locomotion and control of milliscale (insect-size) mobile robots with physical intelligence capabilities, such as shape/stiffness programmability, physical adaptation, adaptive locomotion and multifunctionality, enabled by their bioinspired soft or compliant smart body materials, structures and mechanisms. Third, we study design, fabrication, locomotion and control of micronscale (cell-size) mobile robots, which are much more challenging than the insect-size robots. Biohybrid designs integrate genetically engineered bacterium and alga type of microorganisms to the designed robot bodies to enable self-propulsion, taxis-based sensory locomotion control and active cargo transport and delivery type of functions adaptively in biological media. Synthetic microrobots are actuated by external magnetic fields, acoustic waves or light to swim or surface roll/crawl inside the complex fluids and tissues of the human body. Fourth, since single microrobots are hard to see and limited with their payload carrying capability and applied forces to the environment, a large number of these mobile microrobots is designed to self-organize at the air-water interface or inside liquids and controlled remotely to have a reconfigurable morphology and collective navigation and manipulation capabilities. Finally, we implement the developed milli- and microscale mobile robot design, fabrication and control methods with physical intelligence capabilities in minimally invasive medical applications inside the human body. Medical imaging-based tracking, localization, actuation and control of such single or collectives of wireless medical robots inside the complex, deep and tight sites of the human body are investigated in vitro, ex vivo and in vivo in preclinical small-animal models for specific target high-impact clinical applications.

Physical Intelligence
As one of the core research questions of our department, we aim to understand the underlying principles of physical intelligence (PI) of single and collectives of biological organisms at milli- and micrometer length scales, and realize advanced PI capabilities on small-scale mobile robots using s... Read More
- Protein-based multifunctional and self-healing robotic materials
- Liquid crystal elastomers as novel smart small-scale robot materials
- Bioinspired microfibers for skin adhesion and wearable sensors
- Liquid-superrepellent, high-performance and 3D complex fibrillar adhesives
- Machine learning-based optimization of fibrillar adhesives
- Adhesion of phase-changing liquid Gallium droplets
- 3D printing of cellulose-based stiffness-programmable materials
- Fibrillar adhesives- and suction-based robotic soft grippers

Mobile Millirobotics
We have three focus areas in our mobile millirobotics research thrust currently. The first one is on soft-bodied millirobots with multimodal, adaptive and multifunctional locomotion in complex environments towards minimally invasive wireless soft medical robot applications. The second... Read More
- 3D assembly-based fabrication of complex, soft, multimaterial millirobots
- Shape-programmable soft millirobots with multimodal adaptive locomotion
- Jumping spider leg folding mechanism and body fluid properties
- Machine learning methods for soft millirobot design and control
- Reconfigurable multifunctional ferrofluid droplet robots
- Larval fish–like efficient undulatory swimming
- Soft-bodied jellyfish-like swimming
- Heat-assisted reprogramming of magnetic soft millirobots
- Multimodal locomotion of bioinspired jumping-gliding robot (Multimo-Bat)
- Morphological intelligence counters foot slipping in locust and dynamic robots

Mobile Microrobotics
Micronscale mobile robots are much more challenging than mobile millirobots, since it is almost impossible to integrate on-board computation, power, actuation, sensing and communication on them for meaningful operation durations. Moreover, scaling laws make the surface area- and length-related, short- or... Read More
- 3D printing of multifunctional, biocompatible and personalized microrobots
- Bacteria-powered biohybrid microswimmers
- Microalga-powered biohybrid microswimmers
- Acoustically-powered mobile microrobots
- Light-powered microswimmers
- Magnetic surface microrollers in the blood stream
- Magnetic soft microrobots made of linked microactuator networks

Microrobot Collectives
Single mobile microrobots have limited capabilities, such as the maximum cargo volume delivered to a target location and the maximum external force output, and are impossible or very hard to image and track using medical imaging modalities. Therefore, hundreds and even thousands of microrobot collectives a... Read More
- Self-assembling magnetic robots with dynamic boundaries
- Self-organized mobile microrobotic swarms
- Shape-encoded programmable dynamic assembly of mobile microrobots
- Collective formation and cooperative behavior of magnetic microrobot collectives
- Rotating magnetic microrobot collectives at the air-water interface
- Information entropy to detect order in self-organizing systems

Small-scale Wireless Medical Robots
Wireless small-scale mobile robots have the potential to transform medicine radically. Their small size and wireless mobility can enable access to and navigation in confined, small, hard-to-reach, and risky inner body sites. They can provide minimally invasive interventions and targeted diagnosis and the... Read More
- Optoacoustic tracking of mobile microrobots
- Wireless magnetic millirobots navigating inside brain and other soft tissues
- MRI-powered wireless medical millirobots
- Bioinspired cilia arrays for fluid pumping and object transport inside the body
- Wireless neural stimulation using magnetopiezoelectric nanoparticles
- Biocompatible magnetic materials for miniature medical robots
- Immune cell interaction dynamics of medical microrobots
- Pill-sized swallowable endoscopic soft capsule robot for fine-needle biopsy

Equipment
Our department conducts highly inter- and multidisciplinary research by maintaining robotics (physical), chemistry (wet bench), biology (certified S1 genetic engineering facility), medical imaging and research (in-vitro and ex-vivo small-animal imaging and testing), and microfabrication labs (class 10,000 ... Read More

Transfer of Knowledge
Issued patents: M. Sitti, D. M. Drotlef, M. Amjadi, “Carrier, use of a carrier, method of activating a carrier and method of making a carrier,” EP Patent 3592557, issued in May 2021; US Patent App. 16/500442, Sep. 2019. Read More
Past Projects
- Self-cleaning Fibrillar adhesives
- High-performance multiresponsive paper actuators
- Inflated soft actuators with reversible stable deformations
- Mobile micromanipulation
- Thermocapillary-driven micropumps
- Self-sensing paper actuators based on graphite-carbon nanotube hybrid films
- Parallel microcracks-based ultrasensitive and highly stretchable strain sensors
- Multifunctional ferrofluid-infused surfaces with reconfigurable multiscale topography
- Soiled adhesive pads shear clean by slipping: a robust self-cleaning mechanism in climbing beetles
- Enhanced optimal adhesion using mushroom microfibres
- Flapping wing-based highly dynamic flight
- Soft cubes