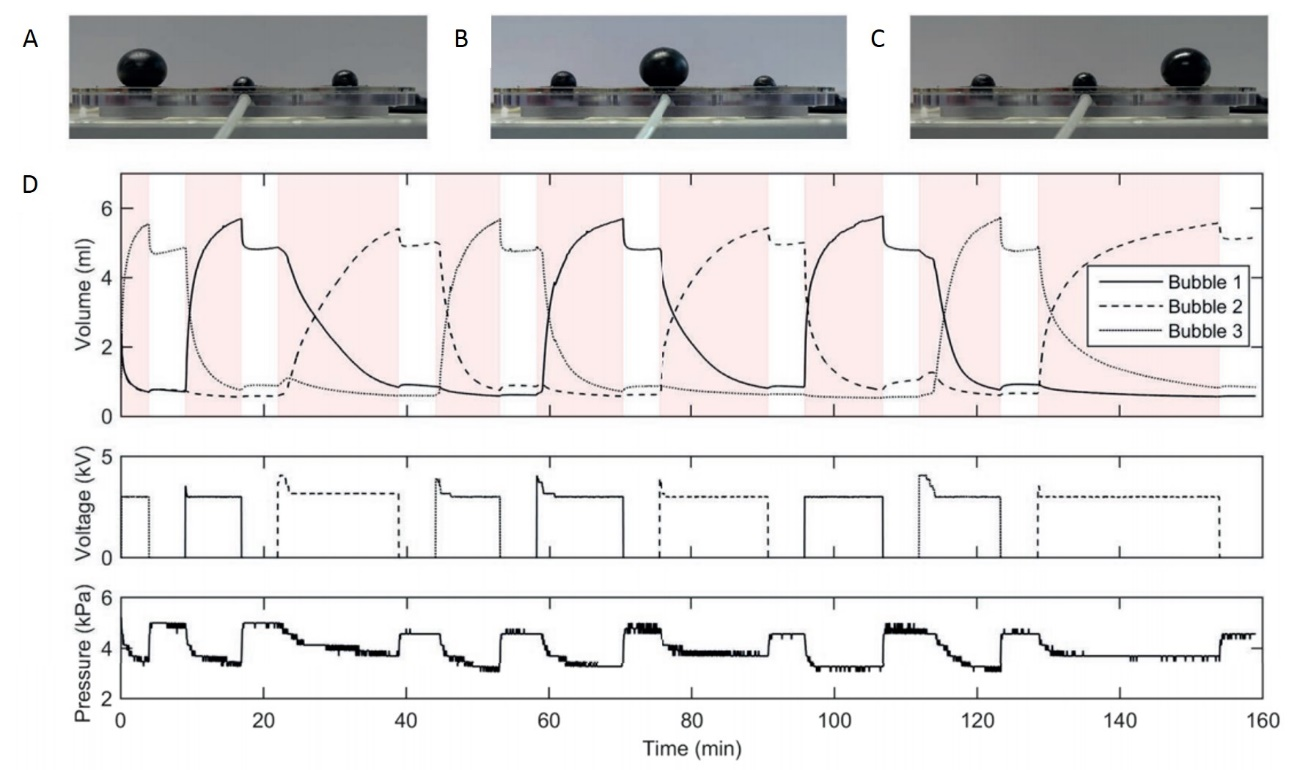
Figure 1: (a-c) Enclosed, inflated system with three stable shapes. Three membranes composed of an acrylic elastomer (VHB4910) share a single connected chamber. In (d), the system transitions between its stable configurations using DEAs. The shaded area marks when a DEA is active.
Soft robotic systems and actuators have the potential to make very robust and adaptable platforms and manipulators. While the majority of natural biological systems are soft-bodied, human-made systems are typically designed to be stiff and rigid to allow fast and precise motions. Though well suited for a manufacturing line, they can encounter safety problems when interacting with human, unknown or unpredictable objects and environments. Air or fluid filled systems, in particular, have been of considerable interest to researchers; by pumping or shifting the internal air or fluid, the system can be actuated while maintaining the desired soft flexible body. However, the vast majority remain tethered, relying upon large off board compressors and/or pumps limiting their practical applications.
We have developed soft, inflated actuators, and robots that are completely enclosed, unreliant upon pumps or compressors, easing their use both in the field and in internal medical procedures making them more scalable. Here we rely upon the nonlinear stress/strain characteristics of many hyperelastic materials in order to design inflated systems with several stable states, transitioning between them with the use of soft, dielectric elastomer actuators (DEAs). The hyperelastic films can exhibit ’snap-through’ behavior, where after a given strain it becomes easier to induce more. Both before and after this cusp are points at which the balloon can sit stably at different volumes for the same internal pressure. By carefully choosing the film material and designing the inflated structure, one can create different stable shapes that can be transitioned between (Figure a-d).