Our department conducts highly inter- and multidisciplinary research by maintaining robotics (physical), chemistry (wet bench), biology (certified S1 genetic engineering facility), medical imaging and research (in-vitro and ex-vivo small-animal imaging and testing), and microfabrication labs (class 10,000 facility) at the highest standards.
Synthesis and characterization of tailor-made responsive advanced materials and structures
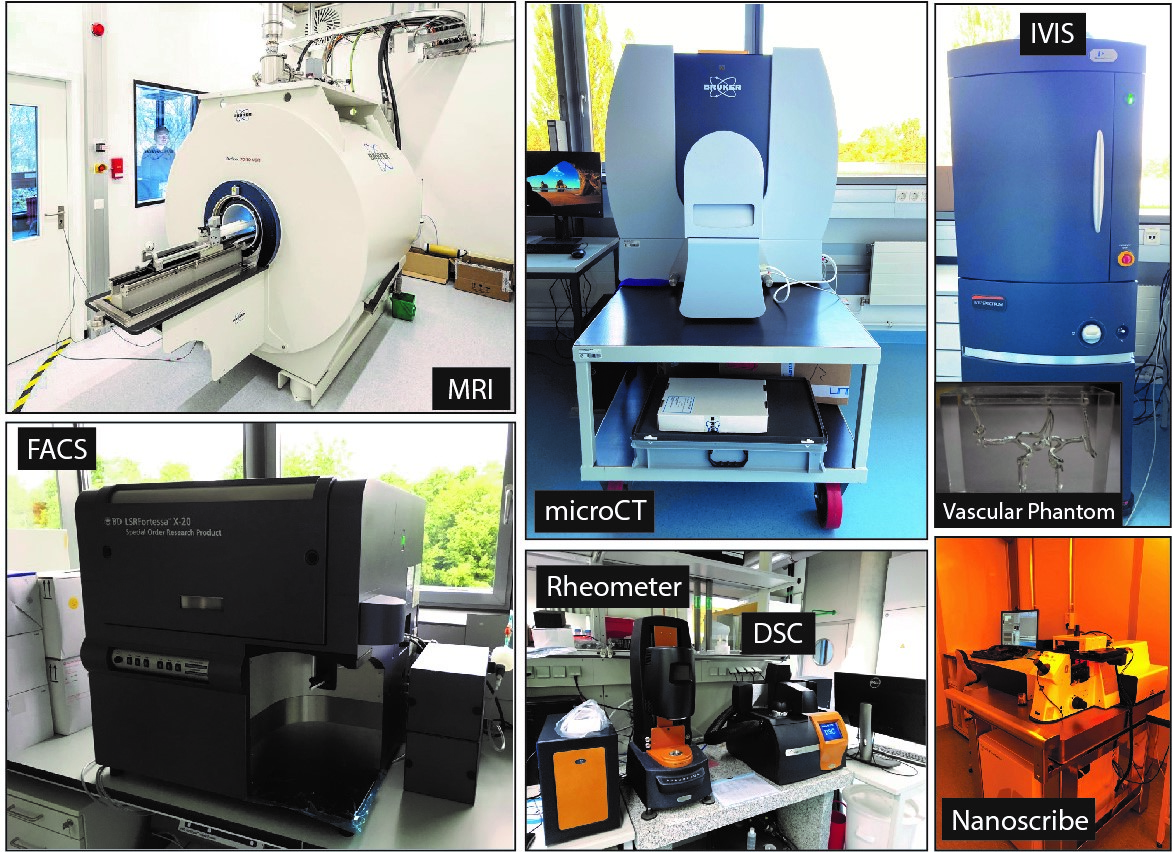
We synthesize various organic and inorganic materials using wet benches in the dedicated chemistry lab. Our chemistry lab is equipped with a cross-polarized microscope (Axio Imager.Z2, Zeiss) and a PolScope (Polaviz) for characterizing and mapping liquid crystal elastomer (LCE) molecular orientations. We use a rheometer (Discovery HR-3, TA instruments) to measure the mechanical properties of LCEs and a differential scanning calorimeter (DSC) (DSC 2500, TA instruments) to characterize polymers. We have an analytical HPLC (1260 Infinity II Prime, Agilent) with a reverse phase column (C18) to rapidly characterize polymeric new materials we synthesize. We have an attenuated total reflection fourier transform infrared spectroscopy (Tensor II, Bruker) to monitor and characterize thin films.
Our dedicated cleanroom area has a spin coater (Laurell Technologies Corporation) and mask aligner (MJB-4 Suss, MicroTec) for photolithography. Most of our microrobots are 3D printed using two direct laser writing systems (Photonic GT, Nanoscribe GmbH) with a range of 1-300 µm and 100 nm resolution. The cleanroom hosts a Parylene coating system (PDS 2010, Specialty Coating Systems) to render devices and robots being fabricated biocompatible and implantable. The lab utilizes a plasma cleaner (PIE Scientific) for surface treatment of samples to clean contaminated surfaces, plasma activation of polymer coating, or etching for microfabrication. Also, in the central cleanroom of our institute, we have a roll-to-roll micro/nanostructure replication system (Coatema) to scale up the production of our micro/nanostructured materials and future robotic systems. We have a dedicated lab to support the research in adhesion and friction properties of engineered surfaces with a microscope (Axio Observer A1, Zeiss) and automated force transducer setups for measuring friction and adhesion and a Laser Microscope (VK-X200, Keyence) with the ability to scan surface profiles in 3D with a lateral resolution of 120 µm and an axial-resolution of about 0.5 nm. We use our scanning electron microscopy (SEM) (Gemini 500, Zeiss) to visualize microfabricated structures. We employ a critical point dryer (EM CPD 300, Leica) and a sputtering machine (EM ACE600, Leica) for sample preparation. For magnetic material characterization, a vibrating sample magnetometer (VSM) (EZ7, Microsense) is available to characterize the magnetization property and magnetize our magnetic materials at 1.8 Tesla. To characterize the surface wetting property of our materials/structures, we have a contact angle goniometer/tensiometer (Kruss DSA100 Drop Shape Analyzer).
Mobile millirobot fabrication and testing
To prototype, characterize, and test millimeter-scale rigid and soft robots, we have a physical lab equipped with essential tools and multiple SLA, FormLab, and extrusion-based 3D printers. We have a 60W CO2 laser cutter and engraver (Epilog) and an ultraviolet laser mill from (ProtoLaser U3, LPKF) with 25 µm resolution for cutting and shaping various thin materials. To actuate magnetic milli/microrobots, we have 6 custom-built magnetic actuation setups. One of them has five coils mounted on a Zeiss Axio Observer A1 inverted microscope. To investigate the interaction between miniature soft swimming robot bodies and fluids, we also have a customized magnetic setup integrated with the MicroPIV (micron-scale particle imaging velocimetry, Dantec). For magnetic manipulation of magnetic soft robots dexterously in 3D space, we have a 7-DOF robotic arm (Franka Emika) connected with a rotational permanent magnet towards clinical use. To characterize jumping-gliding and other robots moving fast and in the air in 3D, we built a cage system (5 m long x 3.2 m width x 4.8 m height) fully equipped with a Vicon system setup to track and characterize the robot movements in 6 DOF visually. Moreover, over 4 high-speed cameras (Phantom) up to 5000 fps are also available.
Mobile microrobot fabrication and testing
We have four biology labs (all S1) for mammalian and various eukaryotic (e.g., algae) and prokaryotic (e.g., E. coli) cell cultures and ten biological characterization labs (all S1). The culture labs are well-equipped with the basic infrastructure, including biosafety cabinets, incubators, autoclaves, and centrifuges. The characterization labs are equipped with a variety of biological optical microscopes. We have a Zeiss inverted microscope (Axio Observer A1, Zeiss), a Nikon Inverted microscope (ECLIPSE Ts2, Nikon), a Nikon inverted fluorescence microscope (ECLIPSE Ti-E, Nikon), a Nikon spinning-disk confocal microscope (Eclipse Ti-E equipped with Yokogawa CSU-X1 spinning disk, Nikon), a Leica stereomicroscope (M205 FA, Leica), and a Leica SP8 single-point confocal in combination with a widefield fluorescence microscope (Leica DMi8 plus SP8). All these microscopes are capable of supporting live-cell imaging for days. With these microscopes, we perform an extensive range of experiments, from toxicity tests of robots on cells and histology to long-term monitoring of robot-cell interaction, to high-speed imaging of bacteria swimming with robots attached, and to high resolution confocal 3D reconstruction of the robot-splenocyte interface. We use fluorescence-activated cell sorting (FACS) (LSRFortessa X-20, BD Biosciences) with five lasers to evaluate the immunogenic potential of our microrobots assessing surface markers of cells, cytokine levels, or simple live-dead applications. Besides these microscopes, we also have a quartz crystal microbalance (QCM) with dissipation (LOT-QuantumDesign) to study sensor devices, including multilayer buildup, drug uptake/release, and bacteria adhesion. We have a biological atomic force microscope system (AFM) (JPK) with an integrated fluorescent optical microscope to measure the surface property and topology of the microrobot materials or bodies. This tool is also used to characterize the physical properties of living and soft materials, such as bacteria, cells, hydrogels, and biopolymers. We perform various in vitro and ex vivo assays to test the toxicity and performance tests of our small-scale medical robots. These assays include Caspase-assays, live-dead-assays, cell-viability-assays, enzyme-linked immunosorbent assays (ELISA), which can be read out using the BioTek Synergy 2 Microplate Reader. We also set up a histology section with a semi-motorized rotary microtome (RM2245, Leica) for the preparation of 2–10 µm-thick tissue samples for routine histological staining as H&E (hematoxylin and eosin) staining, but also more specific immunohistochemistry staining for the evaluation of, e.g., tissue damage, oxidative stress, and infiltration of immune cells.
Medical imaging and testing
We have built a medical imaging facility to develop image-guided actuation, control, and tracking methods for wireless small-scale mobile robots in realistic tissue phantoms and inside small animals. State of the art medical imaging systems are operated mainly by the Medical Systems CSF staff. Currently, our facility is equipped with a 7 Tesla preclinical MRI Scanner (BioSpec 70/30, Bruker), which enables high-resolution 3D imaging, microrobot tracking, and magnetic robot actuation using the gradient coils. After completion of the MedLab, the MRI will move there, where it will be equipped with a state-of-the-art Bruker PET (positron emission tomography) insert for simultaneous PET/MR imaging. We will then be able to detect and track microrobots with high sensitivity. Also, changes in glucose metabolism, proliferation within specific tissues, and hypoxic potential can be assessed in disease models or upon treatment. Next, we have three X-ray-based imaging instruments with various features: preclinical in vivo microCT (Bruker SkyScan 1276), a closed X-ray cabinet (Kubtec XPERT 80-L), and an open mini C-arm (Hologic Fluoroscan InSight FD Flex).
To localize microrobots in realistic tissue phantoms and inside small animals, we have an in vivo imaging system (IVIS) (Perkin Elmer, Spectrum) for 2D and 3D fluorescence, bioluminescence and Cerenkov imaging. We have a multispectral optoacoustic tomography (MSOT) system (iThera Scientific inVision 512-TF) combined with ultrasound imaging for tracking of microrobots within blood vessels with high speed and precision. We also have a separate small-animal ultrasound (US) system (Fujifilm VisualSonics Vevo 3100) with a frame rate of up to 500 Hz and a resolution down to 50 µm, which offers anatomical, hemodynamic, functional, and molecular imaging data. We have an optical coherence tomography (OCT) system (Thorlabs), which allows the acquisition of cross-sectional images up to several millimeters deep into the tissue.