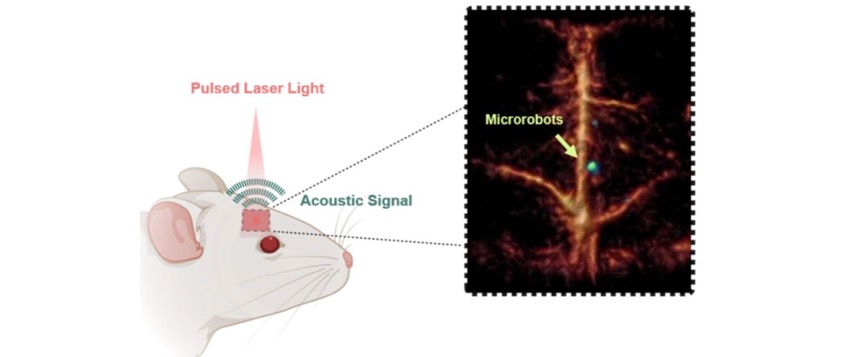
Optoacoustic imaging-based tracking of microrobots inside the mouse brain vasculature. The left image shows a schematic representation of the optoacoustic imaging procedure performed in mice. The microrobots (green) are tracked inside the mouse brain vasculature in 3D and real-time.
The vision of precise and targeted medical interventions within the human body has prompted the development of mobile microrobots to perform various medical tasks. Owing to their size range of a few micrometres up to tens or hundreds of micrometres, they can be navigated across hard-to-reach body regions. Their potential medical applications range from targeted delivery to minimally invasive theranostics. The circulatory system presents an ideal route for microrobots to reach various deep target locations. The small size of the microcapillary requires the use of cell-sized microrobots to allow safe operation in the vascular system. Considering also the relatively high blood flow velocity, in vivo detection, tracking and actuation of microrobots remains an arduous endeavour. While microrobot actuation has seen significant progress in the recent years, 3D real-time tracking of cell-sized robots, especially in the vascular system, has not been accomplished in physiologically relevant conditions. The small size of single microrobots makes their detection and tracking extremely challenging, yet indispensable for achieving precise navigation, control, and validation of therapeutic interventions. Hence, a fundamental need exists for high-resolution, real-time 3D tracking of microrobots in order to facilitate their translation to clinics.
Optoacoustic tomography (OAT) has recently been proposed as a promising new modality for fast tracking of microrobots. OAT pairs good penetration depth with high contrast and high spatiotemporal resolution. In addition, OAT can be used to gain molecular information about the microrobot environment, thereby efficiently monitoring the therapeutic process. We propose non-invasive real-time 3D detection and tracking of the microrobots circulating in the vascular system using optoacoustic imaging. We use magnetic microrobots whose near-infrared optoacoustic signature is enhanced using well-known contrast agents. The microrobots are detected with volumetric optoacoustic tomography both in bloodless and blood-filled ex vivo tissues as well as under real-life conditions in the presence of a strongly absorbing blood background as depicted by the figure. We further demonstrate real-time 3D tracking of the microrobots circulating inside the mouse brain vasculature. This tracking approach paves the way towards effective and safe operation of cell-sized microrobots in challenging and clinically-relevant intravascular environments.