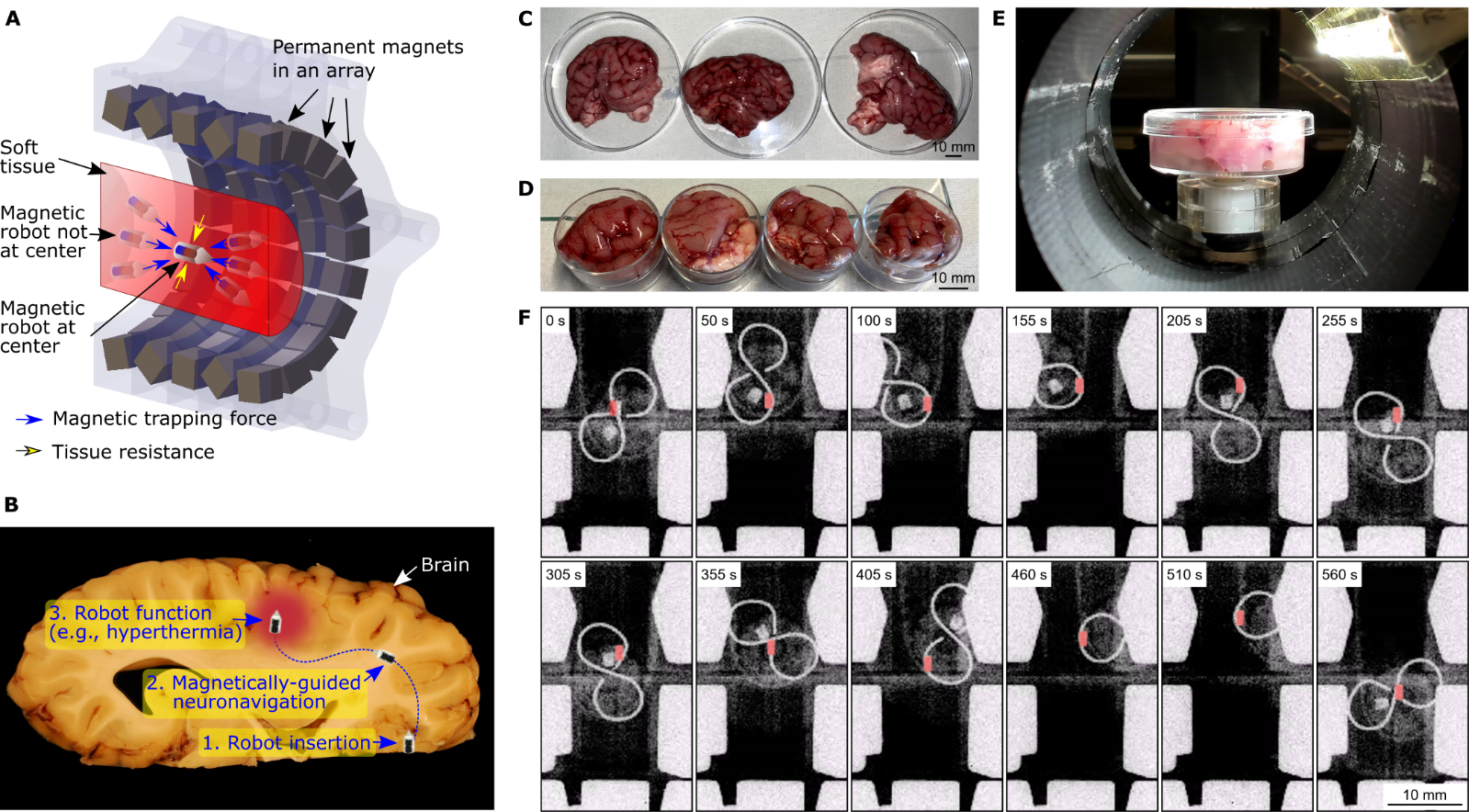
A) Schematic of the half-sectioned magnet array. B) Application scenario of the proposed robotic tissue navigation system. Prepared fresh porcine whole C) and quarter-cut D) brain tissues. E) Cut piece of a porcine brain attached to the robotic motion stage during the ex vivo path-following experiments. F) X-ray fluoroscopy image snapshots of a complete path-following experiment on an ∞-shaped path in the porcine brain. Robot is colored in red to make it distinguishable.
Creating strong magnetic forces to penetrate tissues in a very controlled and stable manner has been the challenge in medical robotics, especially due to the exponentially (on the order of 4) increasing magnetic forces on the robot toward the magnetic source, which is intrinsically unstable in the control aspect. This may result in the magnetic robot flying toward the magnetic source during a surgical operation when the localization and control systems are not extremely well designed with high bandwidths. In this study, we propose to solve this challenge by creating a robot actuation system with a stable magnetic force trap to drive a wireless magnetic robot inside soft tissues. This system can create very strong magnetic forces, which can enable locomotion inside soft tissues. It consists of an array of permanent magnets to generate a special magnetic field map that creates a magnetic force trap inspired by Halbach and Aubert arrays. Here, we propose a custom magnet array to create a stable magnetic force trap that can capture a magnetic robot at an area in 3D space leveraging mechanical interactions with a soft tissue at a point in 3D space with high magnetic gradients for driving it inside soft tissues. The magnet array generates a strong magnetic force toward the area of attraction in the array on the robot that deviates from the area of attraction. In addition, the induced magnetic torques align the robot’s orientation toward the center of the array, which facilitates the sliding motion of the robot toward the center. Our experimental results show that this approach enables open-loop stability of magnetic millirobots in soft tissue phantoms and ex-vivo porcine brain tissue. Furthermore, by combining the array with a robotic 3D positioning system, the path-following of complex trajectories in soft tissues are demonstrated in concert with visual monitoring using 2D fluoroscopic x-ray medical images. In the future, the proposed design of the magnet array and robotic system under a fluoroscope could be used for creating a new generation of wireless medical millirobot systems for navigation and diverse medical functions, such as local and controlled drug delivery, cauterization, biopsy, and neural stimulation in brain and other soft tissues.