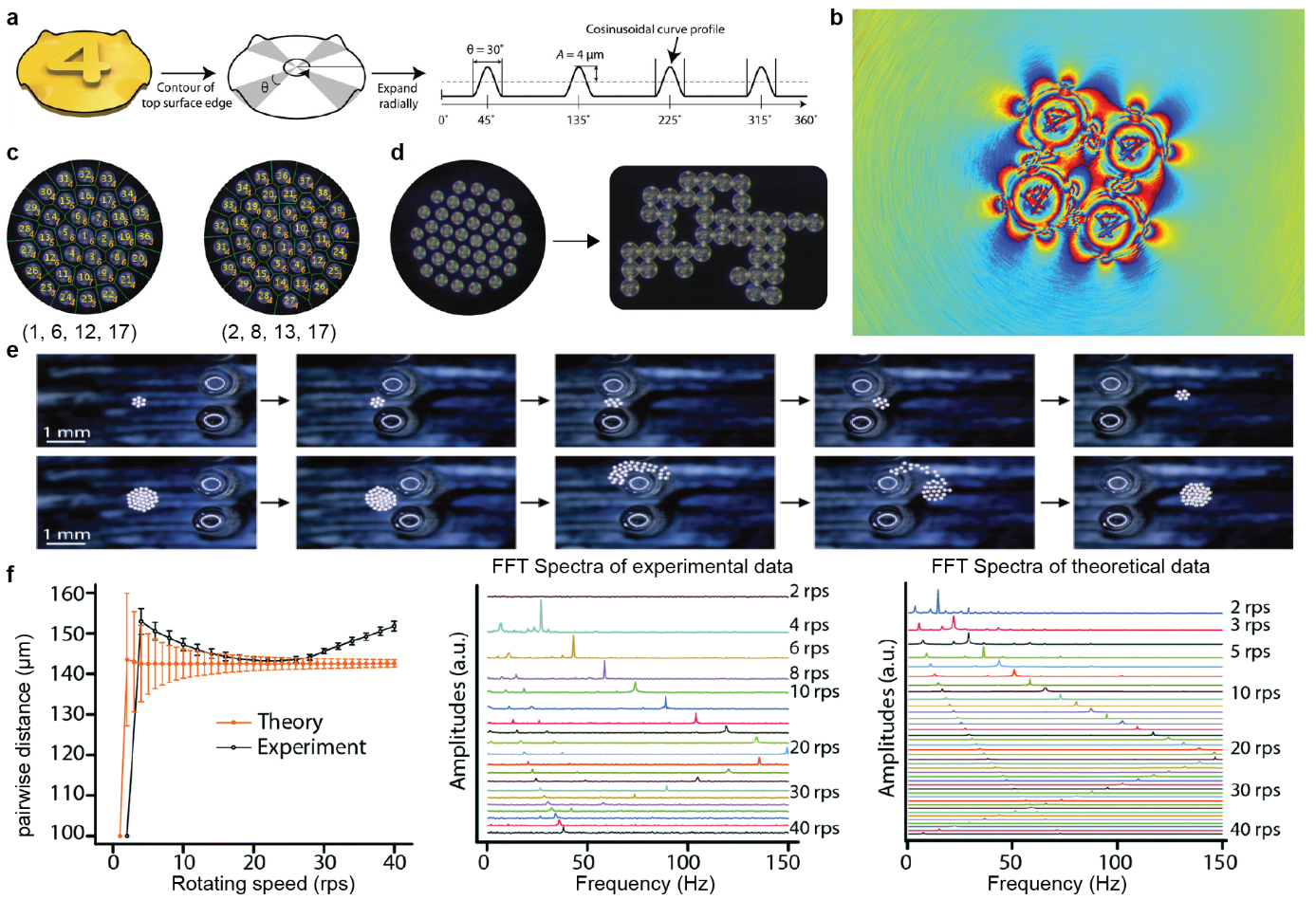
A collective system built from the dynamic and programmable self-assembly of spinning micro-rafts at air-water interfaces. A) The parametric design of a 3D-printed micro-raft. B) Digital holography image showing 4 micro-rafts self-assembling along the corrugations. C) Dynamic patterns of 36 and 40 rafts. D) Programmable self-assembly of 40 rafts. E) Channel-crossing of small (7 rafts) and large (36 rafts) assemblies, showing a size-dependent emergent behaviour. F) Mechanistic study of pairwise interactions, showing decent agreement between experimental and theoretical pairwise distance curves.
Dynamic systems constantly consume energy to maintain their spatiotemporal structures and programmable self-assembly translates information from individual parts to the collective whole. Combining these two in a single system can be useful for both fundamental and robotics applications and it is challenging because of the difficulty in finding suitable interactions that are both dissipative and programmable. By linking concepts from chemistry and materials science to techniques in fluid mechanics and robotics, we proposed a platform of collective microrobots based on both dynamic and programmable self-assembly of spinning magnetic micro-rafts at the air-water interface [ ].
The cosinusoidal edge-height profiles of these micro-rafts not only create a net dissipative capillary repulsion that is sustained by continuous torque input, but also enables directional assembly of micro-rafts. Geometric parameters like the size of the micro-raft, the arc-angle, amplitude, and number of the cosine edge-height profiles can be programmed to guide the self-assembly. Moreover, we have demonstrated emergent collective behaviors such as channel crossing, which can be useful for robotic applications [ ]. In addition, we have modelled the mechanism of the interactions between rafts, in collaboration with Eric Lauga [ ]. This dynamically programmable self-assembled system could serve as a model system for studying non-equilibrium dynamics and statistical mechanics as well as for assembly and control of microrobots in the future.