Wireless small-scale mobile robots have the potential to transform medicine radically. Their small size and wireless mobility can enable access to and navigation in confined, small, hard-to-reach, and risky inner body sites. They can provide minimally invasive interventions and targeted diagnosis and therapy with high precision and efficiency. For example, active navigation of highly concentrated therapeutic and diagnostic agents to the site of action could represent a new state of the art, considering the limited delivery and distribution efficiencies offered by the systemic routes and local diffusion. Thus, we could minimize the effects of systemic toxicity and increase the overall delivery efficacy. Autonomous release of multiple types of payloads with programmable kinetics based on the environmental sensing of local cues in the living milieu could pave the way for microrobotic therapy and diagnosis form an orderly executed, programmable operation.
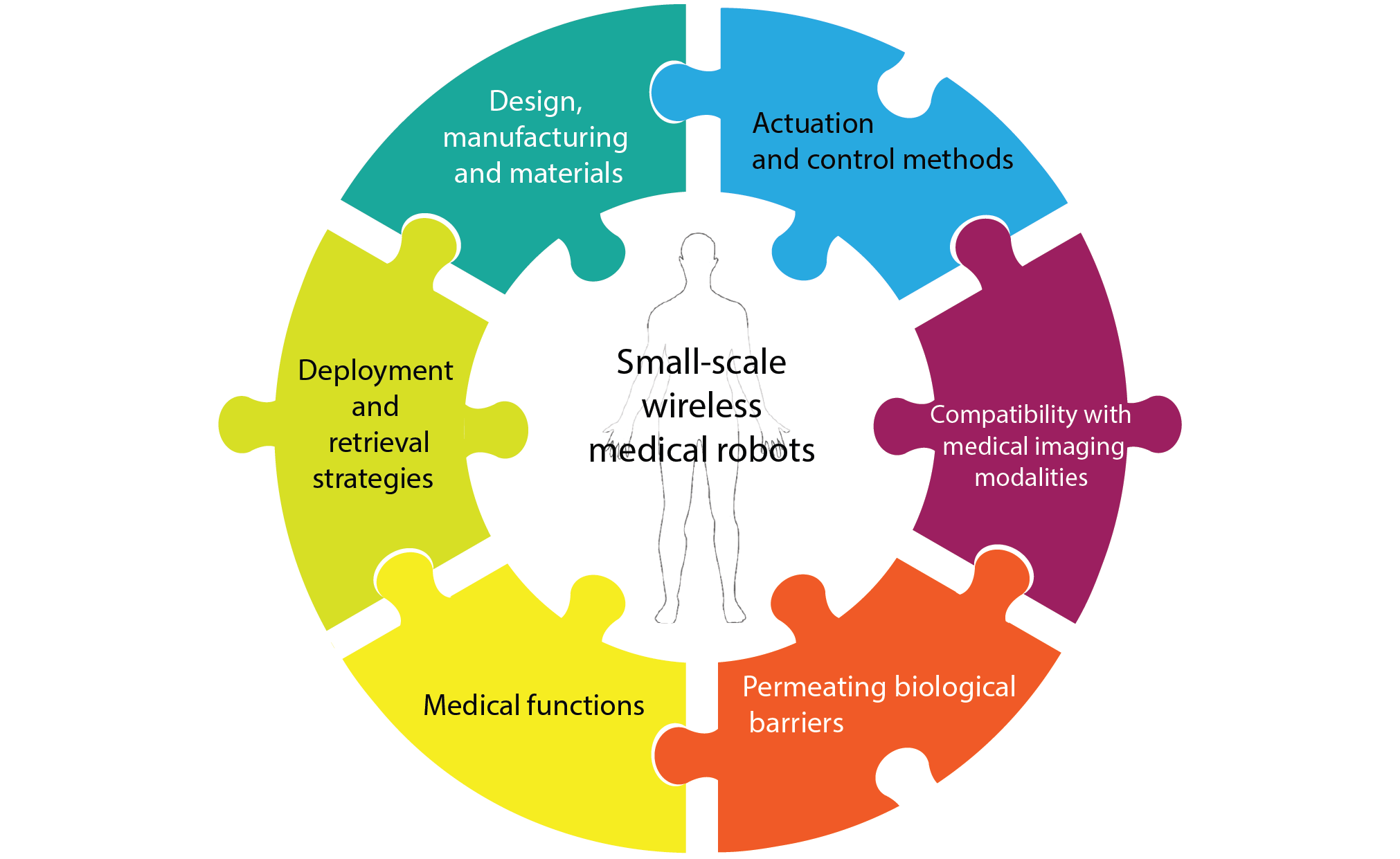
To pave the way for this transformation, our group seeks to understand and address the roadblocking scientific and engineering challenges towards developing wireless medical miniature robots. Our ultimate goal is to create a transforming impact in medicine by (1) improving the diagnostic or therapeutic capabilities of the current state-of-the-art, (2) offering a safer, less invasive, or implantable alternative in particular for patients with special conditions, or (3) enabling previously unthinkable or impossible new diagnostic or therapeutic capabilities. To reach this goal, we take an application-oriented systems approach by addressing all essential aspects that a microrobot needs to function safely in given in vivo conditions of a targeted medical problem. Therefore, our designs consider 3D body shape, material composition, manufacturing technique, permeation into biological barriers, deployment and retrieval strategy, actuation and control methods, medical imaging modality, and the execution of the prescribed medical tasks altogether at the same time. Each of the essential aspects requires specific design considerations, which must be reflected in the physical design of the medical robot. Therefore, all functional parts of the robot are highly interconnected and embedded in its material fabric in a tiny volume. Our group develops multidisciplinary methods by combining engineering with materials science and biology to simultaneously address the grand challenge of integrating these functional parts seamlessly to operate such medical robots inside the human body safely to achieve given target medical functions.


























