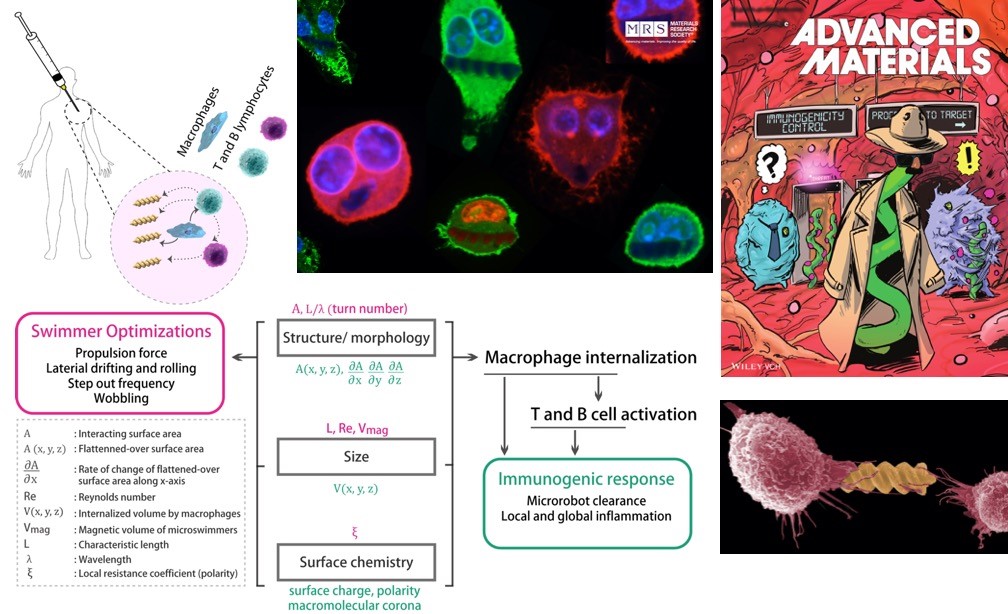
Interaction dynamics of medical microrobots with their local live microenvironments are usually overlooked. Deployment of such micromachines in the body for extended durations can pose significant safety risks from their biocompatibility. When any synthetic material enters or stays inside the body, our immune system counteracts to eliminate it. To elucidate the interaction dynamics of medical microrobots with our immune system, we systematically explored the impact of the robot bosy morphology [ ]. We found that the macrophages and immune cells from the spleen can recognize and differentially elicit an immune response to helix turn numbers of the microswimmers that otherwise have the same size, bulk physical properties, and surface chemistries. However, the same surface-borne design parameters are also critical for the locomotion performance of the microrobots. Our findings suggest that the structural optimization of medical microrobots for the locomotion performance and interactions with the immune cells should be considered simultaneously because they are highly entangled and can demand a substantial design compromise from one another.
Next, we have explored zwitterionic polymers as non-immunogenic stealthy microrobot materials [ ]. Also, our recent efforts have focused on using patient-derivable autologous biomaterials as medical microrobot materials [ ], since they can minimize any risk of cytotoxicity and immune responses as the body would recognize them as self. We have harvested the blood plasma, albu-min, and platelet lysate from the patient’s blood to create functional magnetic microrobots. We envision that a personalized design strategy can impact the design of various future medical robots and devices made of autologous biomaterials for their improved biocompatibility and intelligent functionality.