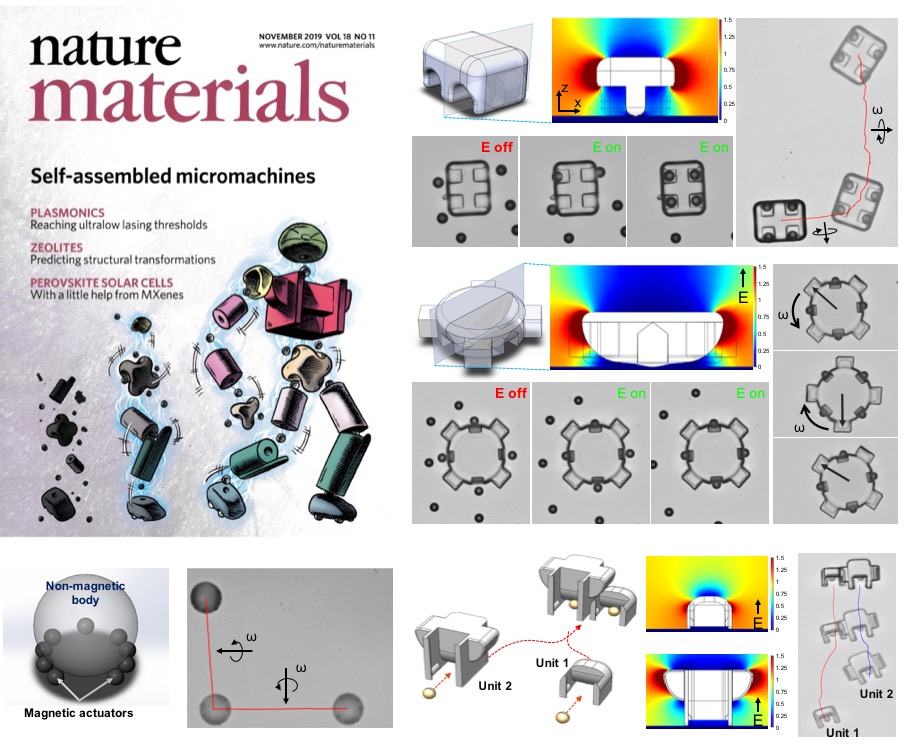
Field-directed and self-propelled colloidal assembly have been used to build micromachines capable of performing complex motions and functions. However, integrating heterogeneous components into micromachines with specified structure, dynamics and function is required for building life-inspired complex hierarchical systems. In this project, we describe the dynamic self-assembly of mobile micromachines with desired configurations through pre-programmed physical interactions between structural and motor units [ ]. The assembly is driven by dielectrophoretic interactions, encoded in the three-dimensional shape of the individual parts. Micromachines assembled from magnetic and self-propelled motor parts exhibit reconfigurable locomotion modes and additional rotational degrees of freedom that are not available to conventional monolithic microrobots. The versatility of this site-selective assembly strategy is demonstrated on different reconfigurable, hierarchical and three-dimensional micromachine assemblies. Our results demonstrate how shape-encoded assembly pathways enable programmable, reconfigurable mobile micromachines. The design principle presented in this project will advance and inspire the development of more sophisticated, modular micromachines and their integration into multiscale hierarchical systems.