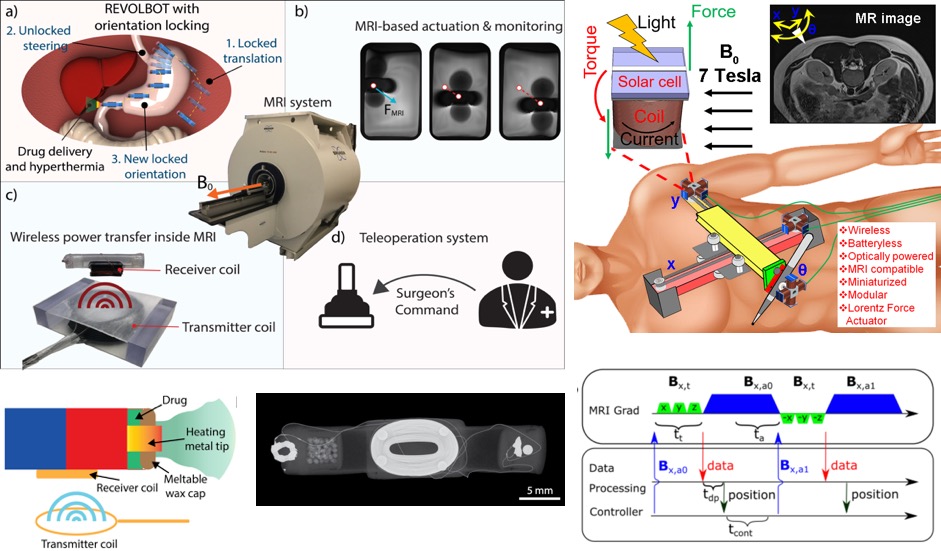
MRI-powered wireless medical robotic systems using the 7-Tesla small animal MRI in our laboratory. MR imaging sequence performs two-way communication with the robotic software. Wirelessly heated MRI capsule robot can be navigated inside ex-vivo tissues and deliver drugs and conduct hyperthermia on demand with remote doctor control. Also, light-driven MRI Lorentz coil actuators are proposed as wireless actuators inside MRI scanners.
Wireless miniature magnetic robots have the potential to reshape the traditional understanding of minimally invasive medical operations with their ability to access hard-to-reach, risky, and unprecedented regions in the human body. However, designing wireless microrobotic systems compatible with medical imaging modalities is still a major challenge towards future applications of microrobots. Therefore, the researchers have combined the microrobot actuation system with various medical imaging techniques, such as magnetic resonance imaging (MRI), ultrasound imaging, and X-ray imaging. Among these imaging modalities, the MRI attracts special attention due to its ionizing radiation-free nature and its superior image resolution of soft tissues compared to the other modalities. In addition to imaging capabilities, MRI hardware can also be used for actuating magnetic robots usig the existing magnetic gradient coils with up to 100 mT/m uniform gradients exerted [ ].
We have developed various wireless milli- and microrobots powered and tracked using an our 7 Tesla (7T) small-animal MRI scanner. There are two main approaches to use MRI’s hardware to actuate wireless robotic systems: magnetic gradient force-based 3D pulling [ ] and Lorentz force-based rotation [ ]. We have demonstrated closed-loop control magnetic particles down to hundreds of micrometer size scales using magnetic pulling-based actuation [ ] and MRI-based robot tracking via specially design MR imaging and actuation sequences. In addition, we designed LC-coupled wireless magnetic capsule robots to perform drug delivery and hyperthermia in ex-vivo tissues [ ]. We are also developing a Lorentz torques-based actively bent catheters and light-powered wireless actuators [ ] operating inside MR scanners towards minimally invasive miniature robot applications.