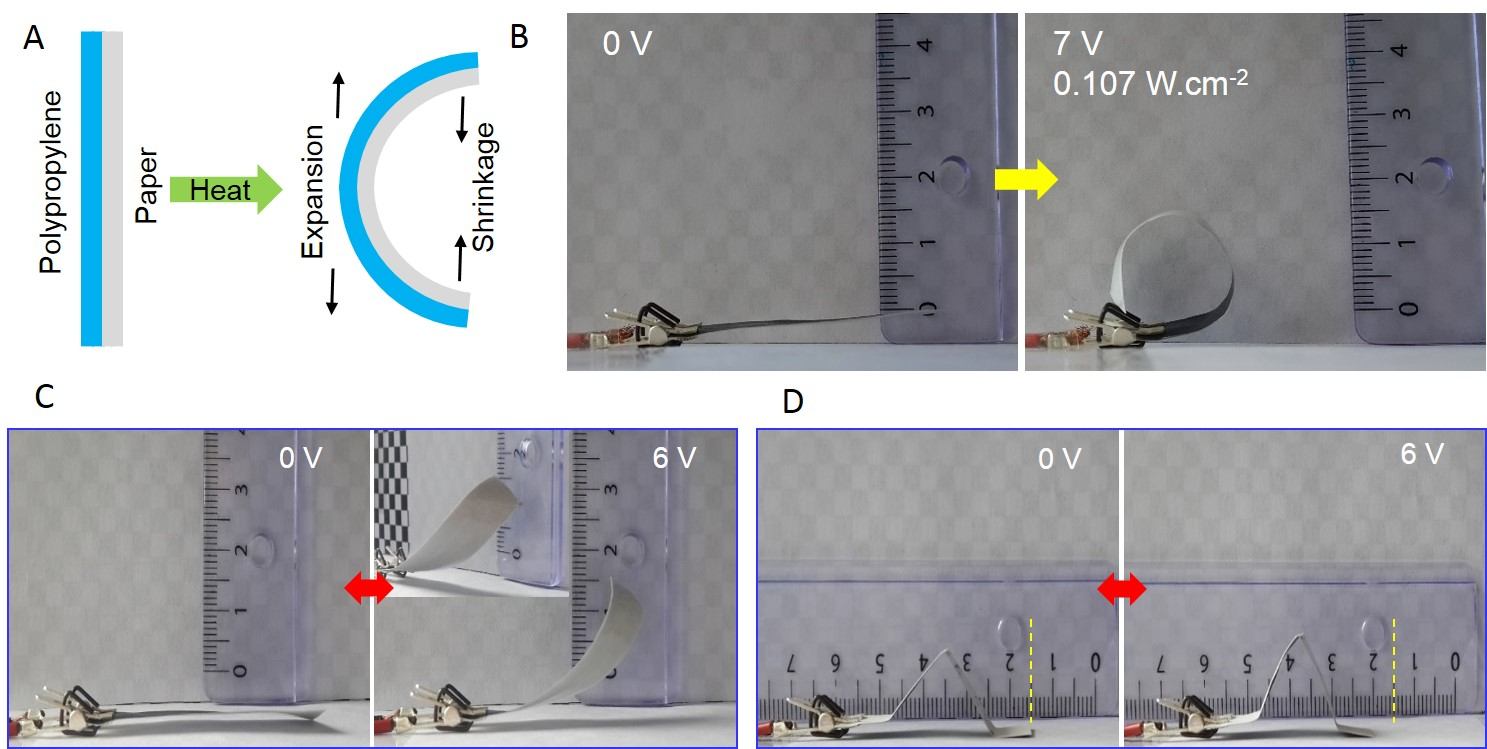
(a) Schematic illustration of a bilayer structure composed of two active layers. (b) Shape-changing behavior of an electrically activated paper actuator. (c) Left-handed twisting-bending motion of an actuator due to the anisotropic hygroscopic properties of the normal copy paper. (d) Linear back and forth motion of a folded actuator.
Soft actuator materials are being actively pursued owing to their importance in soft robotics, artificial muscles, biomimetic devices, and beyond. Electrically, chemically, and light-activated actuators are the mostly explored soft actuators. Recently, significant efforts have been made to reduce the driving voltage and temperature of thermoresponsive actuators, develop chemical actuators that can function in air, and enhance the energy efficiency of light-responsive actuators.
We have designed bilayer actuators that operate based on the large hygroscopic contraction of the copy paper and simultaneously large thermal expansion of the polypropylene film upon increasing the temperature. Different from the traditional bilayer designs that consist of an active layer bonded to a passive layer, our bilayer actuators are composed of two active layer materials (Figure a). To locally control the temperature of actuators, we directly deposited electroresistive heaters made of hybrid films of highly conductive silver nanowire network and highly robust PEDOT:PSS conducting polymer on the paper substrate.
As depicted in Figure (b), electrothermally activated bending actuators can function with low voltages ($\leq$ 8 V), low input electric power per area ($\leq$ 0.14 W cm-2), and low temperature changes ($\leq$ 35 $^{\circ} C$). They exhibit reversible shape-changing behavior with curvature radii up to 1.07 cm-1 and bending angles up to 360 $^{\circ}$. The paper actuators can produce high output forces and lift objects 53.7 times heavier than their own weight. Considering foldability and high anisotropic hygroscopic behavior of the copy paper, we have demonstrated a series of programmable mechanical motions such as bending, angular, linear, and torsional movements (Figures c and d). Besides electrical activation, they can be powered by humidity or light irradiation.