Bacterial biohybrids are formed by integration of motile bacteria with synthetic robot bodies. The potential of bacterial microrobotic applications lies in their autonomously functioning biological units, which provide active propulsion and environmental sensing capabilities, and also in their steerability using external stimuli [ ]. Specific bacteria species have been already tested in the clinics for cancer treatment, which we aim to take to the next level by integrating such bacteria to our biohybrid microrobots for more targeted, multimodal, controlled, and effective treatment.
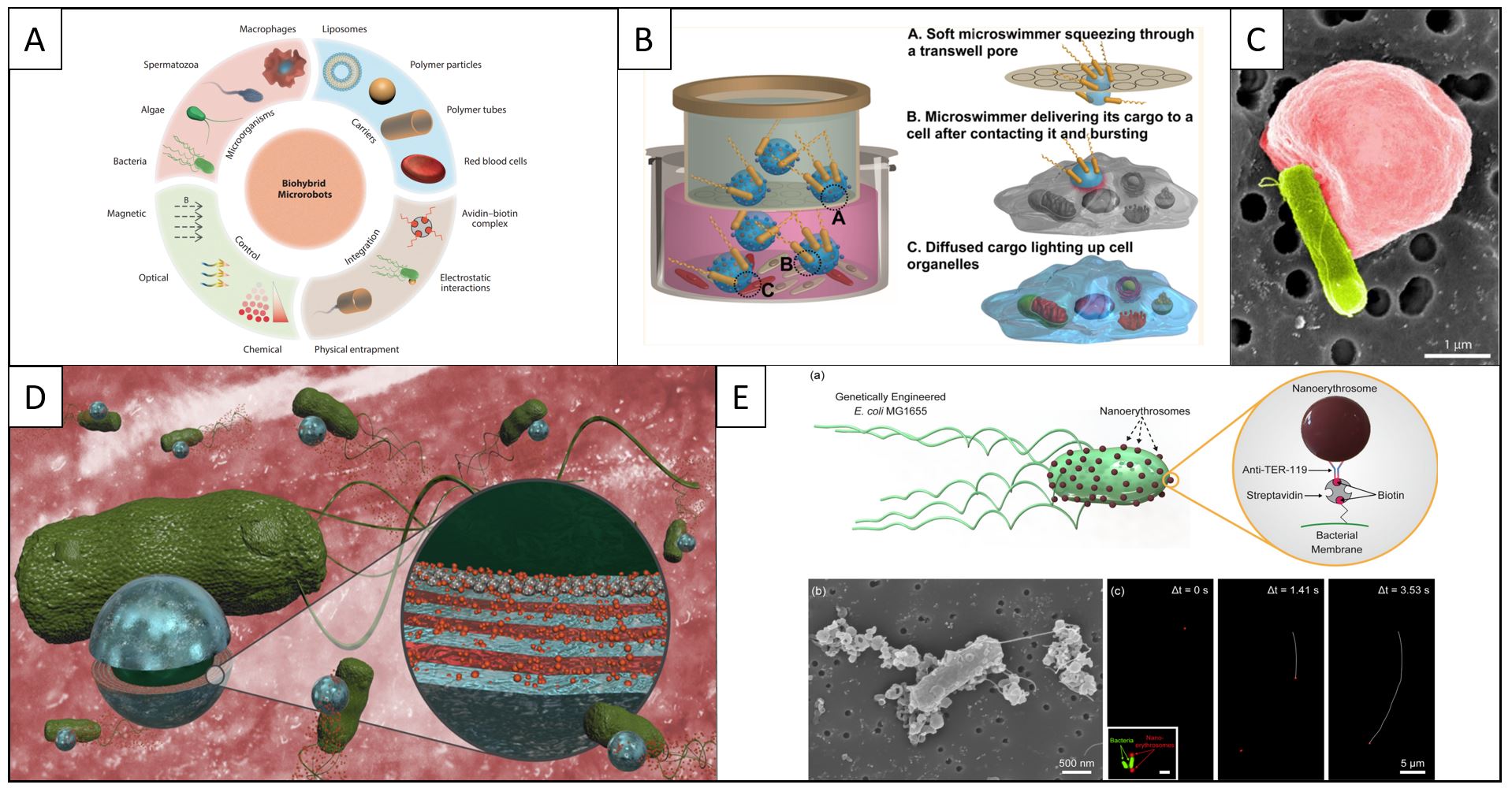
We have designed and characterized various bacteria-powered biohybrid microrobots for targeted active delivery of drugs with high efficiency production, controllability and low cytotoxicity. We have developed various biohybrid platforms with synthetic cargoes, such as microparticles [ ], microtubes [ ], red blood cells (RBCs) [ ], microemulsions [ ], nanoerythrosomes [ ], magnetic nanoparticles, and nanoliposomes. By using mild physical interactions to conjugate artificial cargoes to bacterial cells, such as biotin-streptavidin complex [ ] and electrostatic interactions, we have developed magnetically controllable bacterial biohybrid platforms for various delivery applications [ ]. We have investigated magnetotactic [ ], pH-tactic and chemotactic [ ] behavior of bacterial biohybrids and demonstrated hyperthermia applications using near-infrared light sources and cyanine dyes [ ]. Recently, we prepared bacteria-powered biohybrid microswimmers by conjugating E. coli cells with whole RBC or nanoerythrosomes, which are RBC-based nanovesicles [ ]. Also, we have engineered a bacterial biohybrid platform with magnetic nanoparticles and functional nanoliposomes, where we have showed precise magnetic controllability, magnetic targeting, localization, extracellular matrix invasion, hyperthermia and pH-based delivery of drugs in 3D tumor microenvironments.