Newly developed electromagnetic actuator array-based control mechanisms enable reconfigurable and multifunctional ferrofluid droplet robots towards diverse biomedical and lab-on-a-chip applications.
Magnetically actuated miniature soft robots are capable of programmable deformations for multimodal locomotion and manipulation functions, potentially enabling direct access to currently unreachable or difficult-to-access regions inside the human body for minimally invasive medical operations. However, magnetic miniature soft robots are so far mostly based on elastomers, where their limited deformability prevents them from navigating inside clustered and very constrained environments, such as squeezing through narrow crevices much smaller than the robot size. Moreover, their functionalities are currently restricted by their predesigned shapes, which is challenging to be reconfigured in situ in enclosed spaces.
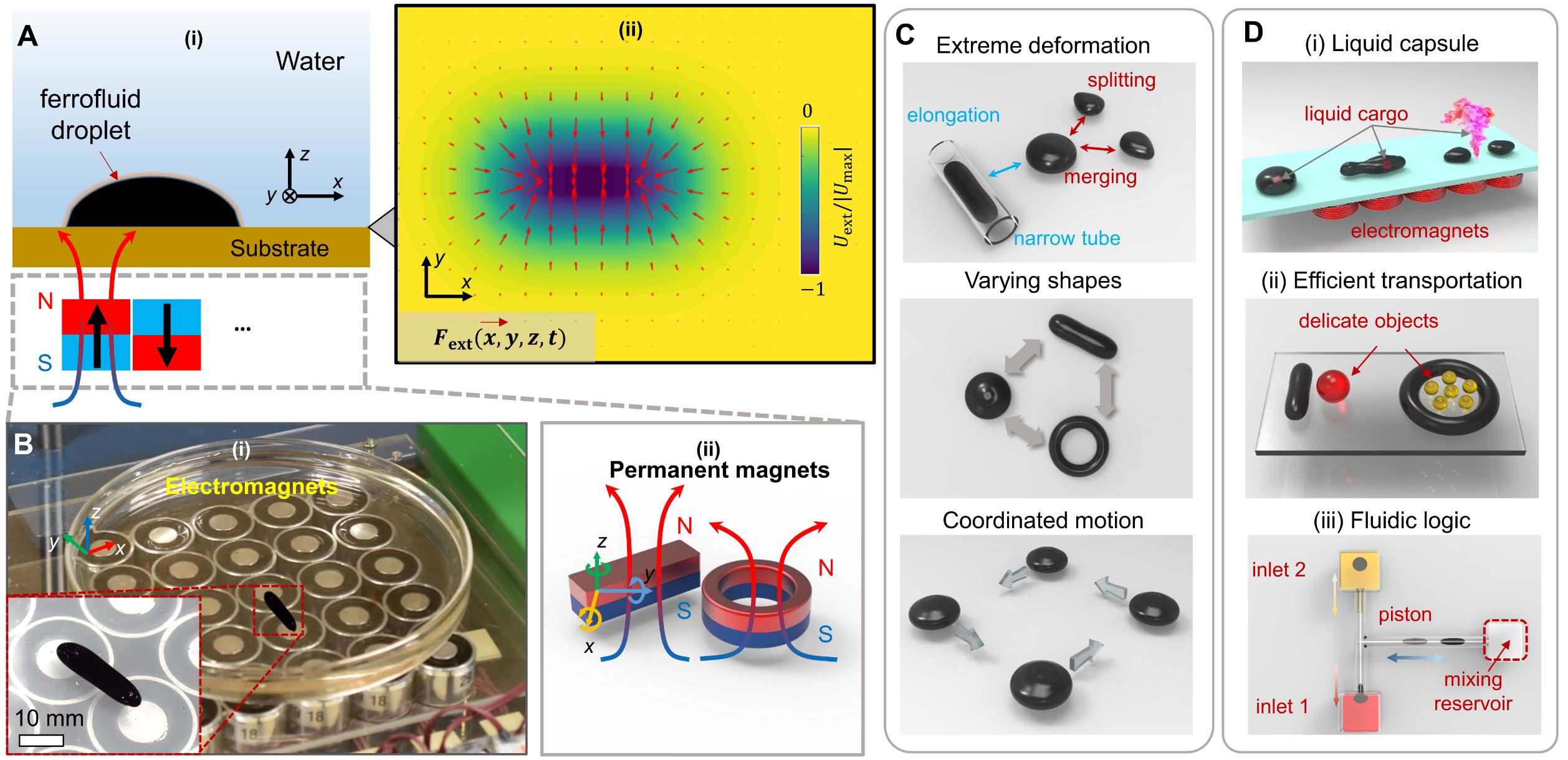
To tackle these challenges, we report reconfigurable multifunctional ferrofluid droplet robots (FDRs) with programmable morphology and cooperative behaviors by programming external magnetic fields spatiotemporally [ ]. We first report the fundamental mechanism to control the complex shape-morphing behaviors and two-dimensional (2D) motions of ferrofluid droplets on solid substrates and in confined spaces, which allows producing much larger deformations (e.g., splitting) of these droplets compared with existing magnetic soft elastomeric robots, and on-demand complex shape-morphing ability compared with existing droplet robots. Then, we demonstrate that these droplet robots could have reconfigurable multiple functionalities, such as splitting and merging for cargo delivery, navigating through narrow channels much smaller than their sizes, and reconfiguring into different shapes for versatile and efficient 2D manipulation of delicate objects. Furthermore, the controllable splitting ability allows a single droplet to disassemble into multiple subdroplets, which can then coordinate their motions and complete cooperative tasks, such as working as a programmable fluidic-mixing device for addressable and sequential mixing of liquid chemicals. Therefore, our proposed reconfigurable multifunctional FDRs could open up a wide range of opportunities to enable diverse unprecedented functionalities that are essential for advanced lab/organ-on-a-chip and biomedical applications.