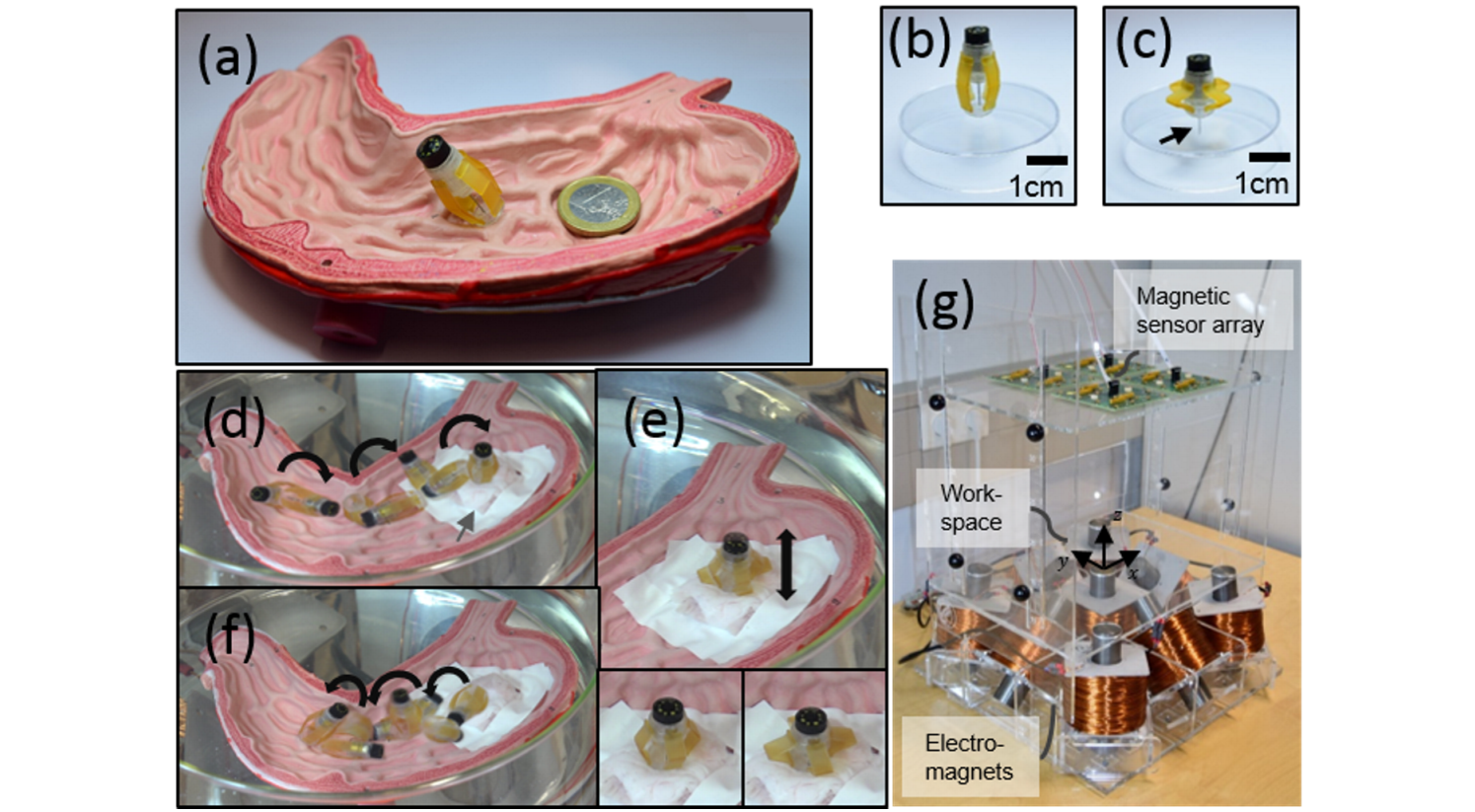
The design, setup and performance of the capsule robot. A) Magnetically actuated soft capsule endoscopy with fine-needle capillary biopsy (B-MASCE) is developed in the size of a pill (diameter: 12 mm, length: 30 mm). B, C) Robot can be collapsed based on external magnetic field. The robot exposes the biopsy needle (the black arrow indicates) by the collapse. D-F) B-MASCE demonstrates fine-needle capillary biopsy on a human anatomy stomach model. The robot takes a biopsy of a porcine fat as a phantom tumor. G) The actuation and localization system for B-MASCE. The system is composed of a magnetic sensor array and nine electromagnets.
Current medical technologies are converging to minimally invasive diagnosis and therapy. The efforts to reduce pain and discomfort for the diagnosis of gastrointestinal (GI) tract gave birth to a new state-of-art technology, wireless capsule endoscopes (WCEs). However, the lack of the mobility of the WCEs limits its application to only one-dimensional GI tracts relying on peristaltic motions. Due to energy and space limitation of the capsule, magnetically actuated soft capsule endoscopes (MASCEs) have been identified as useful. Developed MASCE can move inside a stomach using the external magnetic field, release drug at a specific position, and implanted.
Currently, there are three tasks in our group for the MASCE. First, a magnetic localization method, which is compatible with the magnetic actuation is presented. This method provides reliable feedback for controlling the MASCE in real-time. We are aiming to combine this method with vision algorithms, which enables 3-D mapping of a stomach and localization simultaneously. This will improve the quality of localization and provide a stomach 3-D map for further diagnosis. Second, by exploring the non-uniform magnetic field actuation system and using the localization information, the robot is controlled robustly inside the plastic human anatomical model. The custom designed electromagnetic system is able to generate specific magnetic force and torque for the motion for the navigation and a special diagnostic function, such as biopsy. At last, we demonstrated the fine-needle capillary biopsy in vitro using the current robot design platform and the custom designed magnetic system. The robot is able to take a biopsy from a deep tissue, including sub-mucosal tumors. This method enhances the diagnostic accuracy of biopsy capsule robots.