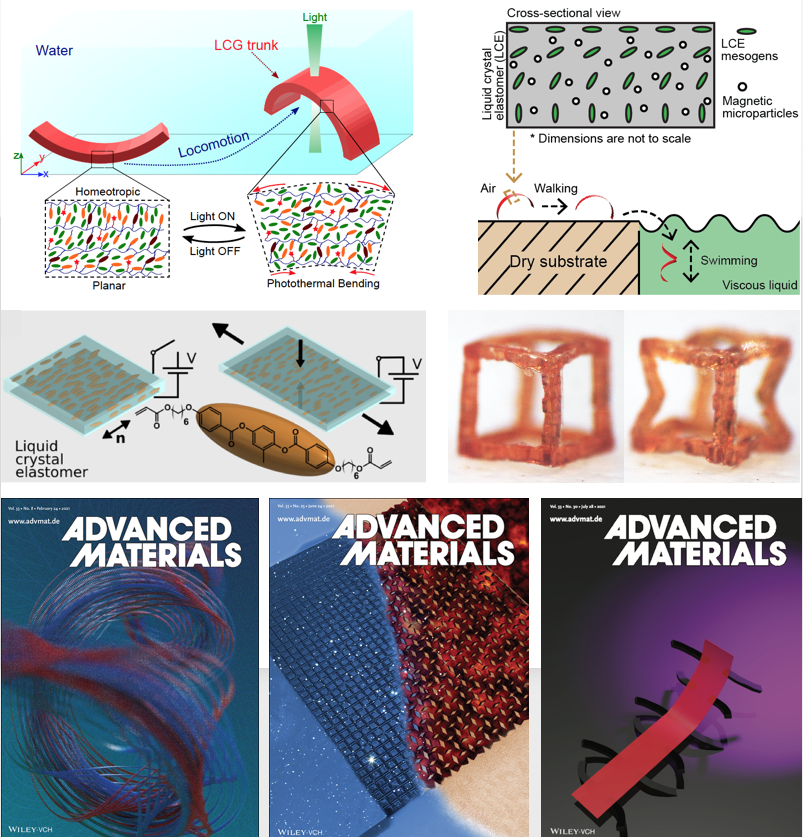
Stimuli-responsive liquid crystal elastomer (LCE) materials can be doped with magnetic microparticles for reconfigurable shape-morphing soft robots [ ]. Next, LCE-actuated micro-metasurfaces, such as kirigami surfaces, are shown to enable tunable optically transpratent surfaces [ ]. Also, thermo- and magneto-responsive bimorph materials enable environment-adaptable millirobots demonstrating advanced physical intelligence [ ].
Liquid crystal elastomers (LCEs) are capable of reversible and programmable shape morphing in response to various external stimuli (e.g., temperature, chemicals) and capable of stiffness programming, which make them promising smart, soft and active small-scale robot materials. We aim to improve the physical intelligence and functionalities of small-scale robots by exploring programmable morphing modes and multi-stimuli responsiveness of LCEs. We have developed various strategies to develop LCE-based robot bodies for their applications in small-scale soft robotics.
We developed micro-scale LCE structures with programmable 3D geometries and 3D director fields, which enabled versatile shape morphing of soft machines. Firstly, we fabricated pixelated micro-channels with programmable orientations by using two-photon polymerization. These micro-channels could be used to introduce arbitrary 2D alignment of thermotropic liquid crystals (LCs), lyotropic chromonic liquid crystals (LCLCs), and LCEs [ ]. We achieved designable 3D director fields by designing different microchannels on two confining surfaces. Micro-scale 3D LCE structures with arbitrary 3D director fields were fabricated using two-photon polymerization. We demonstrated how 3D director fields affect the shape-morphing ability of 3D LCE microstructures using a chemical solvent or temperature as a stimulus [ ]. Additionally, we fabricated sub-millimeter scale cubic LCE voxels and assembled them into various 3D geometries. We then demonstrated designable shape morphing behaviors of these assembled 3D geometries with programmed director fields. Finally, we demonstrated switchable high-resolution polarization colors from LCE pixels with adjustable thicknesses [ ].
We have been combining LCEs with magneto-elastomer materials to enable multimodal actuation and stimuli-responsiveness of miniature robot bodies. As the first strategy, we doped micro-scale magnetic particles (NdFeB) into LCE matrix to enable magneto-responsiveness [ ]. We optimized the concentration of magnetic particles to preserve morphing modes of LCEs and to actuate LCEs with low magnetic fields. The optimized material was used to demonstrate LCE robotic structures, which were self-adaptable to changing environmental conditions or stimuli. As the second strategy, we developed a thermo- and magneto-responsive bimorph material by integrating the respective thermo-responsive LCEs with magneto-elastomers as respective active layers [ ]. We applied three different configurations to achieve such bimorph actuator material. We demonstrated reconfigurable shape morphing of structures made up of such bimorph materials.
We have been also exploring three different topics: LCE-actuated micro-kirigami structures, shape programmable dielectric elastomers, and underwater actuation of liquid crystal gels. First, we utilized thermally actuated LCEs as artificial muscles to actuate kirigami microstructures remotely [ ]. This strategy has significant potential in boosting the fundamental small-scale meta-structure research and the design of soft robots at the micro-scale. Second, we explored the large mechanical anisotropy of LCEs based on the local anisotropic elasticity and Poisson’s ratio to achieve highly efficient and shape-programmable dielectric elastomer actuators [ ]. These electric field-driven elastomers were able to achieve a strain rate of 120% per second and energy conversion efficiency of 20%, and exerted force outputs over 700 times the elastomer weight at room temperature. Finally, we fabricated extremely soft light-driven liquid crystal gel robots by doping liquid crystal into liquid crystal networks to achieve highly efficient underwater locomotion (crawling, walking, jumping, and swimming) for the first time [ ]. This study was the Cozzarelli Prize Finalist in the Engineering and Applied Sciences category in the PNAS journal in 2020, where 1 paper won the prize and our paper was the only finalist out of over 4000 papers published in PNAS in that year.
LCEs, combined with other smart actuator materials, structures and mechanisms, would enable advanced physical intelligence capabilities for small-scale and even large-scale soft robots, surfaces and devices.