Bioinspired underwater locomotion of light-driven liquid crystal gels
2020
Article
pi
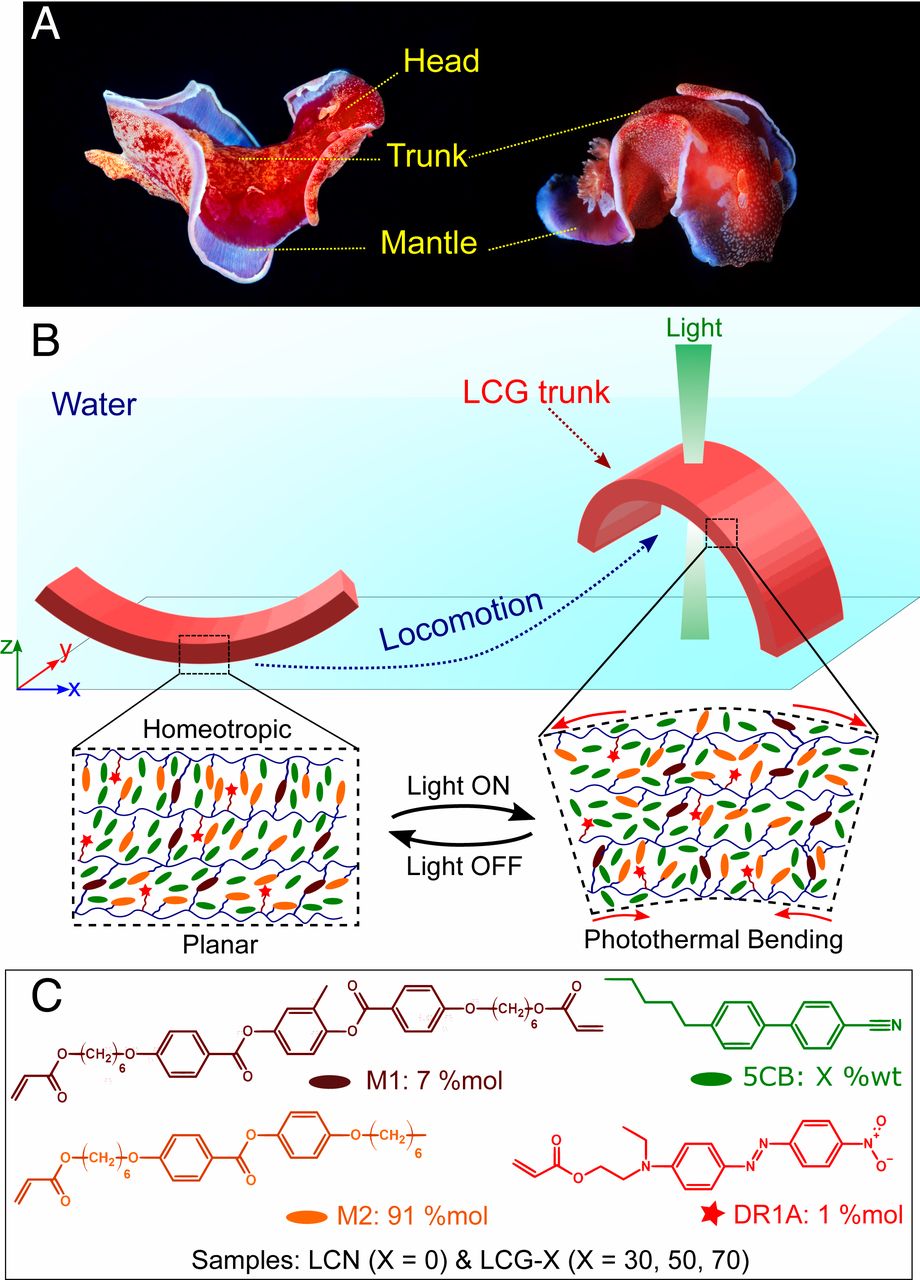
Untethered dynamic shape programming and control of soft materials have significant applications in technologies such as soft robots, medical devices, organ-on-a-chip, and optical devices. Here, we present a solution to remotely actuate and move soft materials underwater in a fast, efficient, and controlled manner using photoresponsive liquid crystal gels (LCGs). LCG constructs with engineered molecular alignment show a low and sharp phase-transition temperature and experience considerable density reduction by light exposure, thereby allowing rapid and reversible shape changes. We demonstrate different modes of underwater locomotion, such as crawling, walking, jumping, and swimming, by localized and time-varying illumination of LCGs. The diverse locomotion modes of smart LCGs can provide a new toolbox for designing efficient light-fueled soft robots in fluid-immersed media.
| Author(s): | Shahsavan, Hamed and Aghakhani, Amirreza and Zeng, Hao and Guo, Yubing and Davidson, Zoey S. and Priimagi, Arri and Sitti, Metin |
| Journal: | Proceedings of the National Academy of Sciences |
| Volume: | 117 |
| Number (issue): | 10 |
| Pages: | 5125--5133 |
| Year: | 2020 |
| Department(s): | Physical Intelligence |
| Research Project(s): |
Liquid crystal elastomers as novel smart small-scale robot materials
|
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1073/pnas.1917952117 |
|
BibTex @article{shahsavan2020bioinspired,
title = {Bioinspired underwater locomotion of light-driven liquid crystal gels},
author = {Shahsavan, Hamed and Aghakhani, Amirreza and Zeng, Hao and Guo, Yubing and Davidson, Zoey S. and Priimagi, Arri and Sitti, Metin},
journal = {Proceedings of the National Academy of Sciences},
volume = {117},
number = {10},
pages = {5125--5133},
year = {2020},
doi = {10.1073/pnas.1917952117}
}
|
|