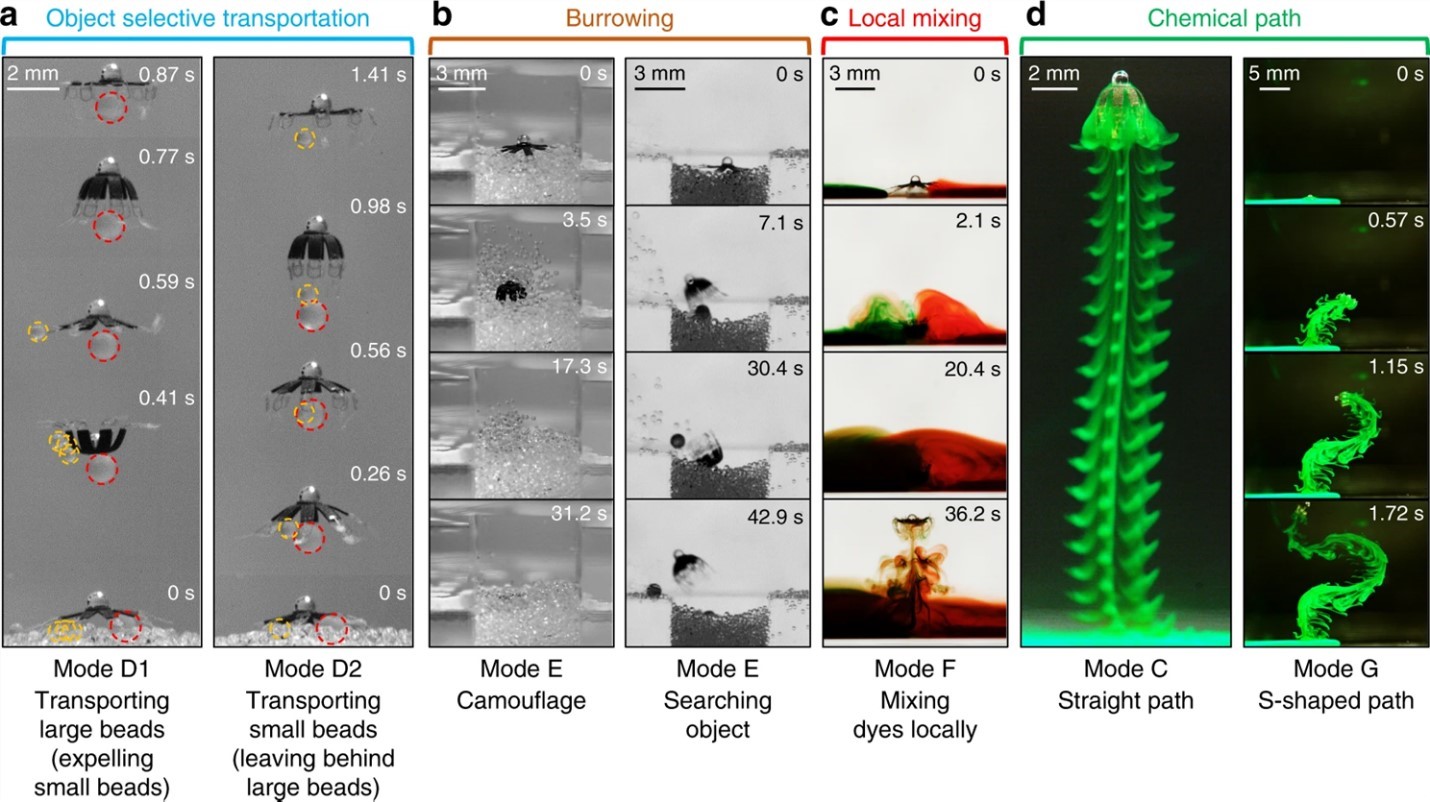
Four tasks realized by our jellyfish-inspired soft robot: A) Object selective transportation i) to transport large beads while expelling small beads and ii) to transport small beads and leave behind large beads; B) Burrowing for camouflage and searching in fine beads; C) Locally mixing two food dyes with different colors; D) Generating a desired concentrated chemical path while moving in a desired S-shaped path.
The advanced functions, e.g., object manipuiation, of the existing miniature swimming robots significantly decrease as the robot size gets smaller due to the limitations on their on-board components. To achieve the object manipulation function, microswimmers operating in the low Reynolds number (Re) regime have been proposed to incur controlled viscous fluidic flows to manipulate objects. However, it is unclear whether such approach is applicable in the moderate Re regime, where both inertial and viscous forces play critical roles. To realize the non-contact object manipulation in such regime, we propose a jellyfish-like soft millirobot, which could realize multiple functionalities by producing diverse controlled fluidic flows around its body using its lappets that are bent by remote magnetic fields. It can mimic the energy-efficient swimming kinematics and the prey capture behaviors of the ephyra jellyfish in nature.
This study particularly investigates the influence of different jellyfish-inspired swimming modes on the propulsion and object manipulation performances [ ]. The interaction between the robot’s soft body and the surrounding fluid can incur different propulsion speeds, efficiencies, and flow patterns, and such interaction is utilized to achieve predation-inspired object manipulation capabilities towards different robotic tasks, such as selectively trapping and transporting objects of two different sizes, burrowing into granular media, enhancing the local mixing of two different chemicals, and generating a desired concentrated chemical path. Several medical functions, such as drug delivery, channel clogging, and patching to a target position under the ultrasound guidance have also been demonstrated with some adaptations in the robot design [ ]. This innovative study received the Best Paper Award in Robotics Science and Systems Conference in 2019. This pioneering study exactly mimics the biological lappet kinematics, swimming, and predation type of multiple functions simultaneously in a soft robot for the first time. Such robotic model can be used to study the unknown behaviors of the jellyfishes.