Traditional robots and actuators are typically composed of rigid and brittle materials. By contrast, in the growing field of soft robotics, flexible and largely deformable materials are explored to achieve compliance akin to that of biological systems. Compliance and complex deformation enable the soft robots to adapt to unpredictable surroundings, which makes these robots safer for physical interactions with humans and for operation in dynamic environments. Although soft machines are generally resistant to blunt damage (for example, impact, compression, and bending), they are vulnerable to mechanical damage (puncture, tear, and cutting) owing to their inherent softness, which limits their performance, reliability, and durability.
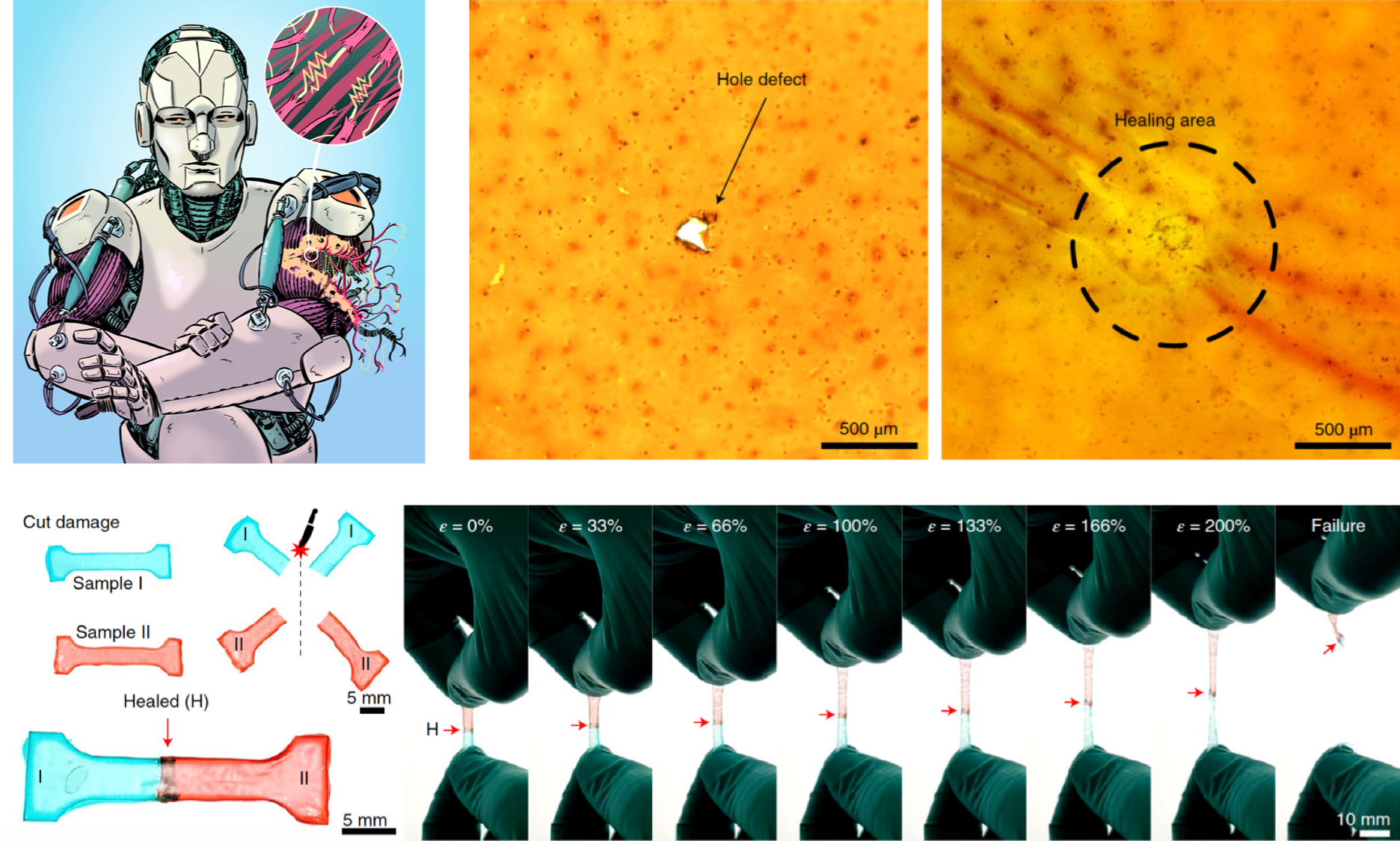
In our research, we are leveraging the properties of biological materials such as proteins to develop advanced materials to incorporate new functions to soft robots [ ]. Biological materials provide great control of their properties through structural changes, for example: we have developed self-healing soft actuators made from proteins that can self-heal micro- and macro-scale mechanical damage within seconds [ ], with healing properties that surpass by several orders of magnitude those of other natural and synthetic soft materials. Here, we have used squid ring teeth protein in the wild and also genetically engineered form to optimize the self-healing and other mechanical properties. Using the same proteins, we have also developed V-shaped chemical motors that can self-propel in aqueous environments with high efficiency and respond to chemical cues in their environment. Here, we use the controlled diffusion of a fuel from the protein matrix to induce chemical surfactant-based Marangoni forces for fast and powerful propulsion. These high-performance protein-based materials can address current limitations in soft robotics, and find applications in drug delivery, self-healing artificial muscles, self-healing industrial grippers, environmental remediation, or personal protective equipment.