A generic design method enables controlling swarm magnetic microrobots with a significantly higher complexity in collective formation and more advanced functionalities compared with previous works.
Magnetically actuated mobile microrobots can access distant, enclosed, and small spaces, such as inside microfluidic channels and the human body, making them appealing for minimally invasive tasks. Despite their simplicity when scaling down, creating collective microrobots that can work closely and cooperatively, as well as reconfigure their formations for different tasks, would significantly enhance their capabilities such as manipulation of objects. However, a challenge of realizing such cooperative magnetic microrobots is to program and reconfigure their formations and collective motions with under-actuated control signals.
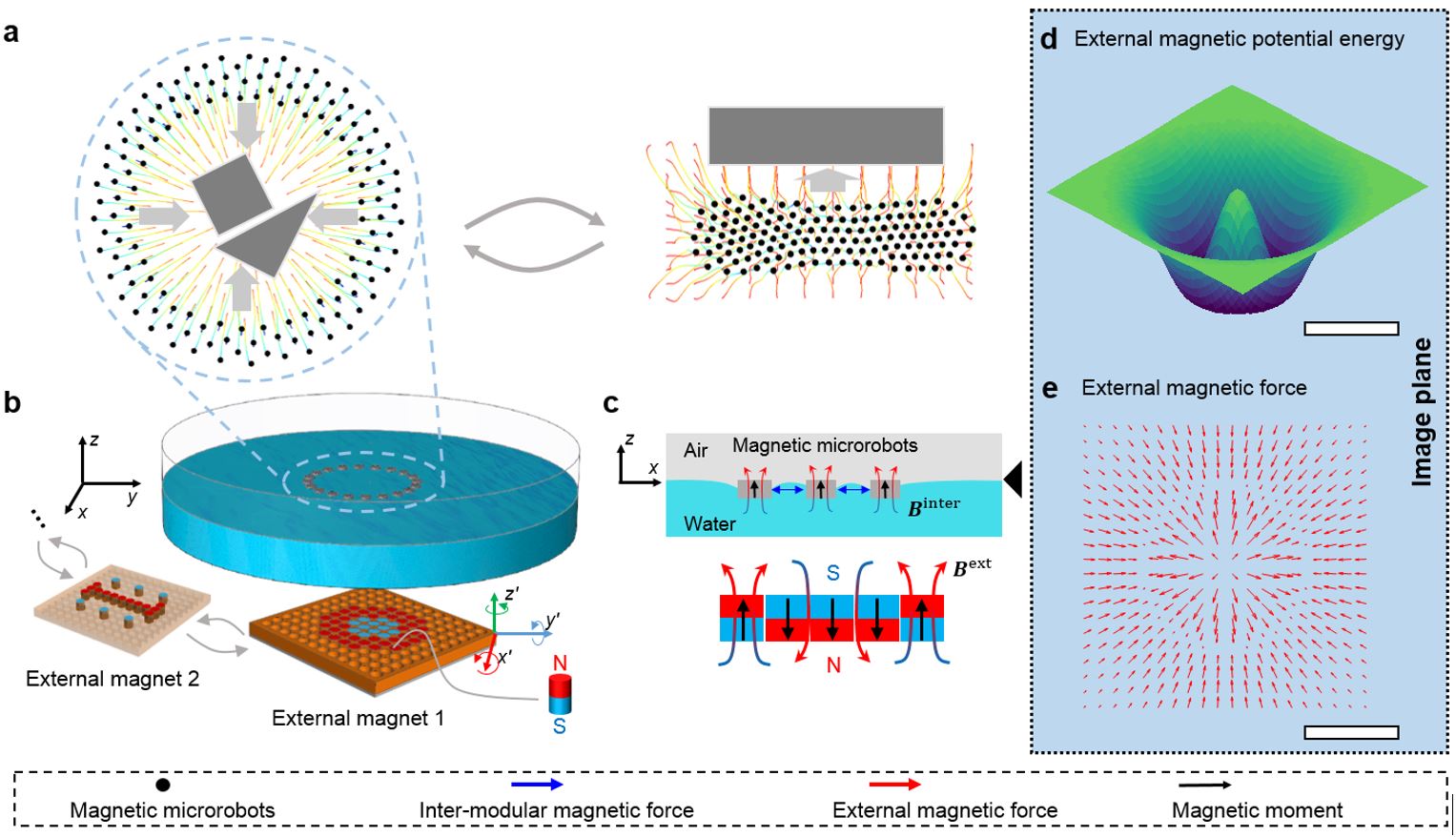
To tackle this challenge, this project presents a method of controlling 2D static and time-varying formations among collective self-repelling ferromagnetic microrobots (100 {\textmu}m to 350 {\textmu}m in diameter, up to 260 in number) by spatially and temporally programming an external magnetic potential energy distribution at the air–water interface or on solid surfaces. A general design method is introduced to program external magnetic potential energy using ferromagnets [ ]. A predictive model of the collective system is also presented to predict the formation and guide the design procedure. With the proposed method, versatile complex static formations are experimentally demonstrated and the programmability and scaling effects of formations are analyzed [ ]. We also demonstrate the collective mobility of these magnetic microrobots by controlling them to exhibit bio-inspired collective behaviors such as aggregation, directional motion with arbitrary swarm headings, and rotational swarming motion. Finally, the functions of the produced microrobotic swarm are demonstrated by controlling them to navigate through cluttered environments and complete reconfigurable cooperative manipulation tasks.