Moving boundaries confine magnetic particles into reprogrammable self-assembled patterns.
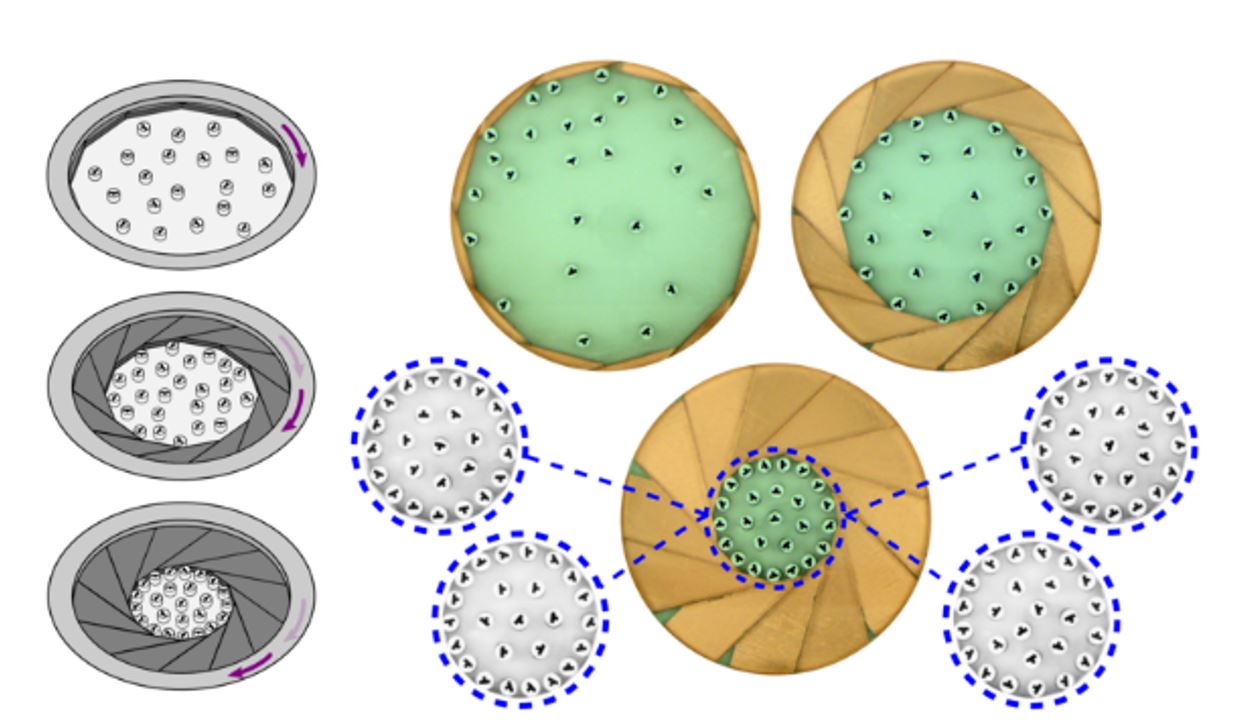
Self-assembly is an autonomous process where complex and functional structures are created in a bottom-up manner by the organization of a large set of components. Each component locally interacts with the others to create patterns, often with an unknown outcome: in the end, the patterns do not necessarily have a pre-conceived design. We aim to understand the underlying process of self-assembly. As this process continuously takes place both in living and non-living systems in a multitude of scales, our motivation is to understand the rules and dynamics of self-assembly. Specifically, we are interested in gaining the ability to control the self-assembly process to elucidate fundamental physics, and also to enable the fabrication of novel material systems and design of robotic systems. We propose a control approach that allows the programming of self-assembled patterns in a repeatable and reversible way [ ]. We achieve this by confining magnetically repulsive millimeter-scale particles inside an orbitally shaken platform that provides a constant source of kinetic energy for the particles. Our confinement system compresses the freely moving particles via moving hard boundaries and traps them into diverse 2D patterns.
We exploit boundaries to steer self-assembly processes. The mechanical shaking in our system is functionally analogous to temperature in Brownian motion, and we could macroscopically simulate colloidal self-assembly processes. We showed that we can statistically program these 2D patterns by controlling the rate of particle compression. Moreover, our programming approach is reversible; meaning that after selecting one pattern, the system can be restored to its original state and reprogrammed to choose another. Our approach also shows the programming of material properties, as these patterns have unique elasticity and magnetic clutching properties. We show the correlation between confinement dynamics and resulting self-assembled structures, and also demonstrate the tuning of their mechanical and magnetic properties. By using our dynamic boundary regulation approach, we would like to use small-scale mobile robot swarms instead of particles and pave the way for a new approach for reconfigurable robotic systems.