
Guillermo Amador
Assistant Professor at Wageningen University, Netherlands
Alumni
Note: Guillermo Amador has transitioned from the institute (alumni).

2021
Göttler, C., Amador, G. J., van de Kamp, T., Zuber, M., Boehler, L., Siegwart, R., Sitti, M.
Fluid mechanics and rheology of the jumping spider body fluid
Soft Matter, 17(22):5532-5539, 2021 (article)
2019
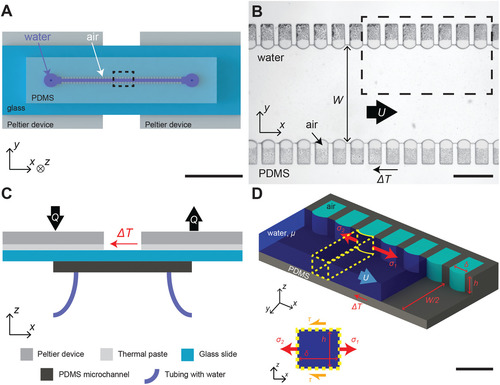
Amador, G. J., Ren, Z., Tabak, A. F., Alapan, Y., Yasa, O., Sitti, M.
Temperature gradients drive bulk flow within microchannel lined by fluid–fluid interfaces
Small, 15(21):1900472, Wiley Online Library, 2019 (article)
2018
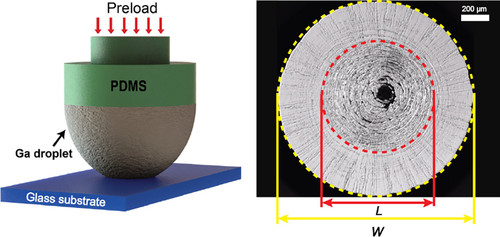
Yunusa, M., Amador, G. J., Drotlef, D., Sitti, M.
Wrinkling instability and adhesion of a highly bendable gallium oxide nanofilm encapsulating a liquid-gallium droplet
Nano Letters, 18(4):2498-2504, March 2018 (article)
2017
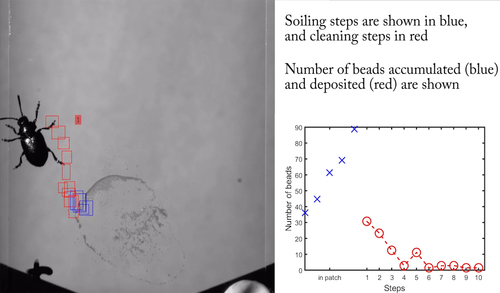
Amador, G., Endlein, T., Sitti, M.
Soiled adhesive pads shear clean by slipping: a robust self-cleaning mechanism in climbing beetles
Journal of The Royal Society Interface, 14(131):20170134, 2017 (article)

Amador, G. J., Hu, D. L.
Sticky Solution Provides Grip for the First Robotic Pollinator
Chem, 2(2):162 - 164, 2017 (article)
