Dynamic analysis on hexapedal water-running robot with compliant joints
2017
Conference Paper
pi
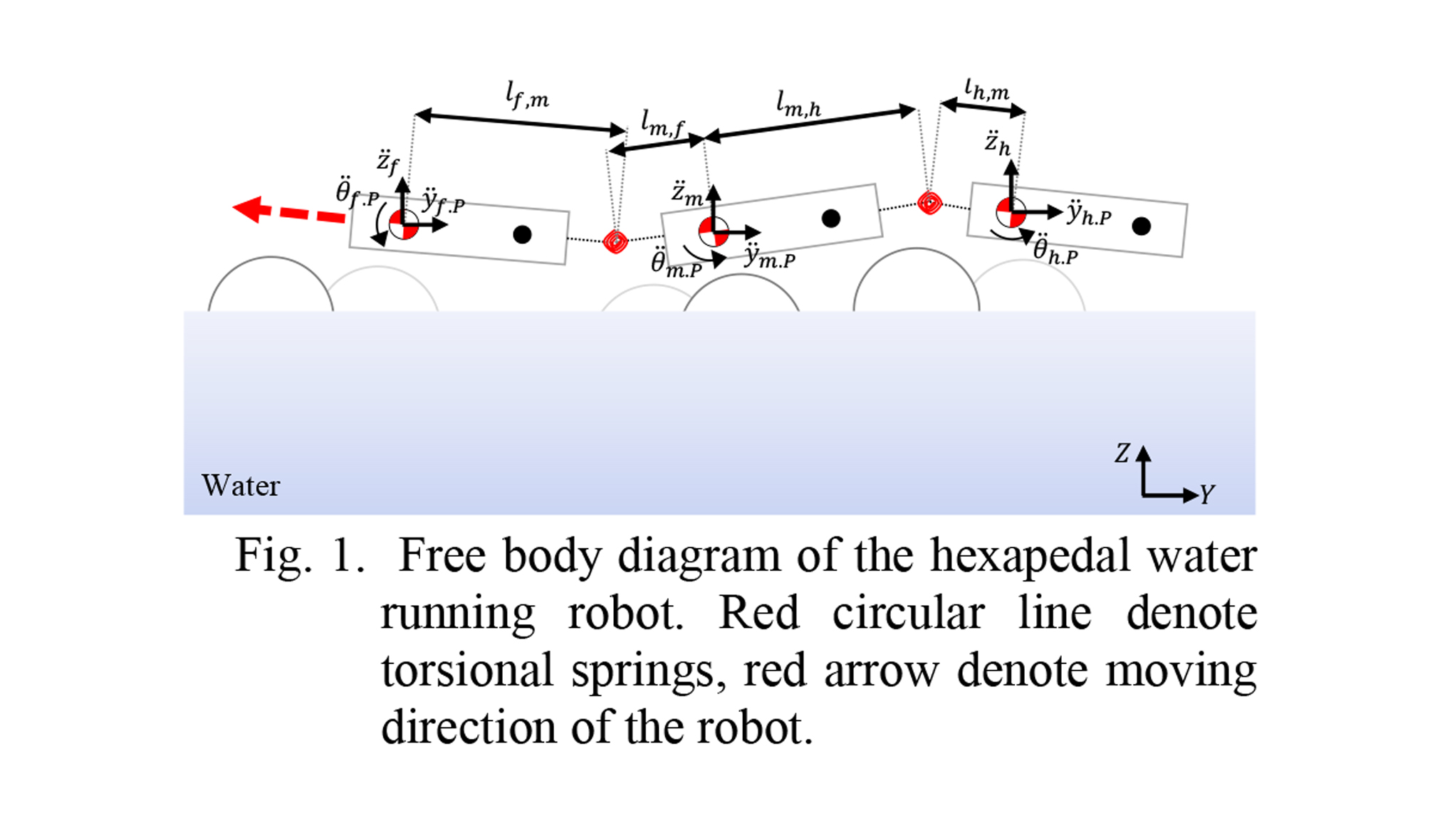
The dynamic analysis has been considered as one of the important design methods to design robots. In this research, we derive dynamic equation of hexapedal water-running robot to design compliant joints. The compliant joints that connect three bodies will be used to improve mobility and stability of water-running motion's pitch behavior. We considered all of parts as rigid body including links of six Klann mechanisms and three main frames. And then, we derived dynamic equation by using the Lagrangian method with external force of the water. We are expecting that the dynamic analysis is going to be used to design parts of the water running robot.
| Author(s): | Kim, H. and Liu, Y. and Jeong, K. and Sitti, M. and Seo, T. |
| Book Title: | 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) |
| Pages: | 250-251 |
| Year: | 2017 |
| Month: | June |
| Day: | 28 |
| Department(s): | Physical Intelligence |
| Bibtex Type: | Conference Paper (inproceedings) |
| DOI: | 10.1109/URAI.2017.7992797 |
|
BibTex @inproceedings{7992797,
title = {Dynamic analysis on hexapedal water-running robot with compliant joints},
author = {Kim, H. and Liu, Y. and Jeong, K. and Sitti, M. and Seo, T.},
booktitle = {2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI)},
pages = {250-251},
month = jun,
year = {2017},
doi = {10.1109/URAI.2017.7992797},
month_numeric = {6}
}
|
|