Learning Soft Millirobot Multimodal Locomotion with Sim-to-Real Transfer
2024
Article
pi
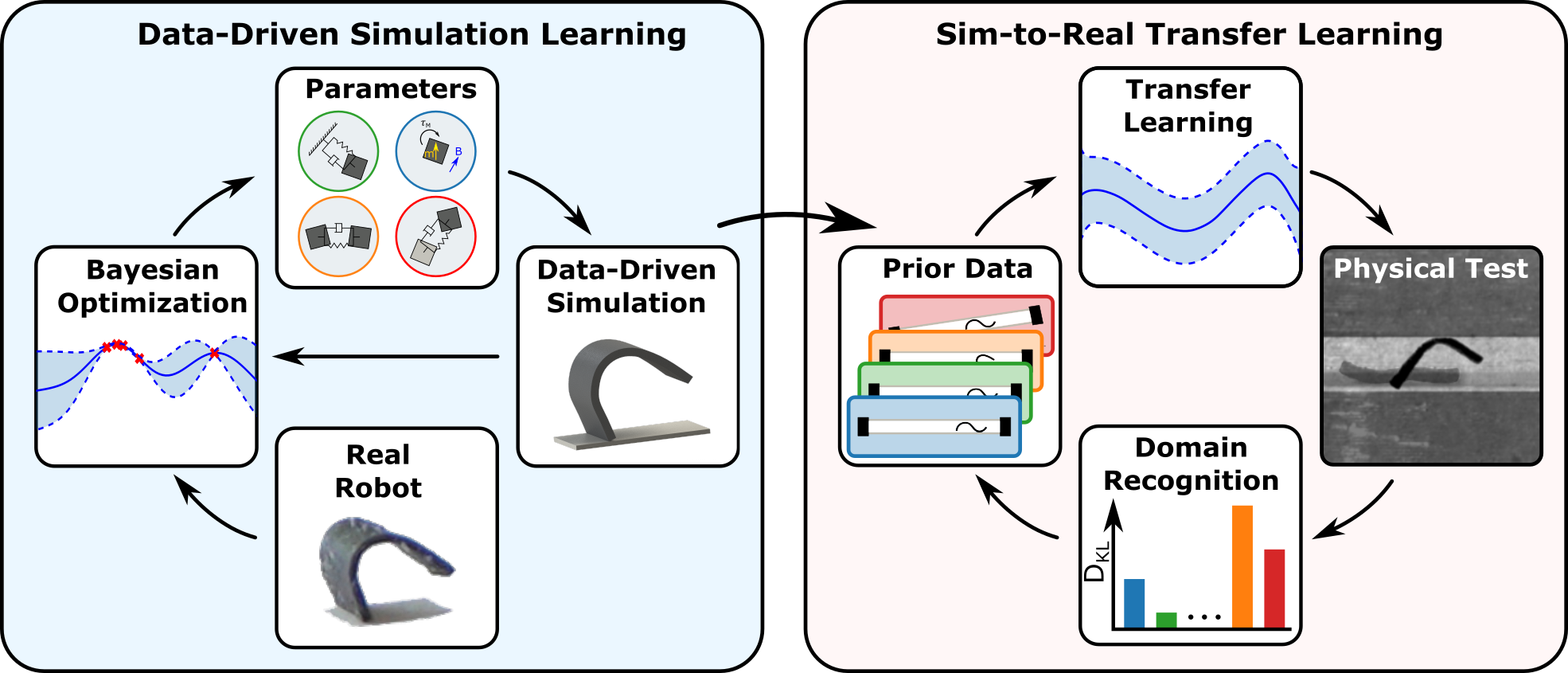
With wireless multimodal locomotion capabilities, magnetic soft millirobots have emerged as potential minimally invasive medical robotic platforms. Due to their diverse shape programming capability, they can generate various locomotion modes, and their locomotion can be adapted to different environments by controlling the external magnetic field signal. Existing adaptation methods, however, are based on hand-tuned signals. Here, a learning-based adaptive magnetic soft millirobot multimodal locomotion framework empowered by sim-to-real transfer is presented. Developing a data-driven magnetic soft millirobot simulation environment, the periodic magnetic actuation signal is learned for a given soft millirobot in simulation. Then, the learned locomotion strategy is deployed to the real world using Bayesian optimization and Gaussian processes. Finally, automated domain recognition and locomotion adaptation for unknown environments using a Kullback-Leibler divergence-based probabilistic method are illustrated. This method can enable soft millirobot locomotion to quickly and continuously adapt to environmental changes and explore the actuation space for unanticipated solutions with minimum experimental cost.
| Author(s): | Demir, Sinan Ozgun and Tiryaki, Mehmet Efe and Karacakol, Alp Can and Sitti, Metin |
| Journal: | Advanced Science |
| Year: | 2024 |
| Department(s): | Physical Intelligence |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | https://doi.org/10.1002/advs.202308881 |
| State: | Published |
|
BibTex @article{demir2024simtoreal,
title = {Learning Soft Millirobot Multimodal Locomotion with Sim-to-Real Transfer},
author = {Demir, Sinan Ozgun and Tiryaki, Mehmet Efe and Karacakol, Alp Can and Sitti, Metin},
journal = {Advanced Science},
year = {2024},
doi = {https://doi.org/10.1002/advs.202308881}
}
|
|