Rubbing Against Blood Clots Using Helical Robots: Modeling and In Vitro Experimental Validation
2017
Article
pi
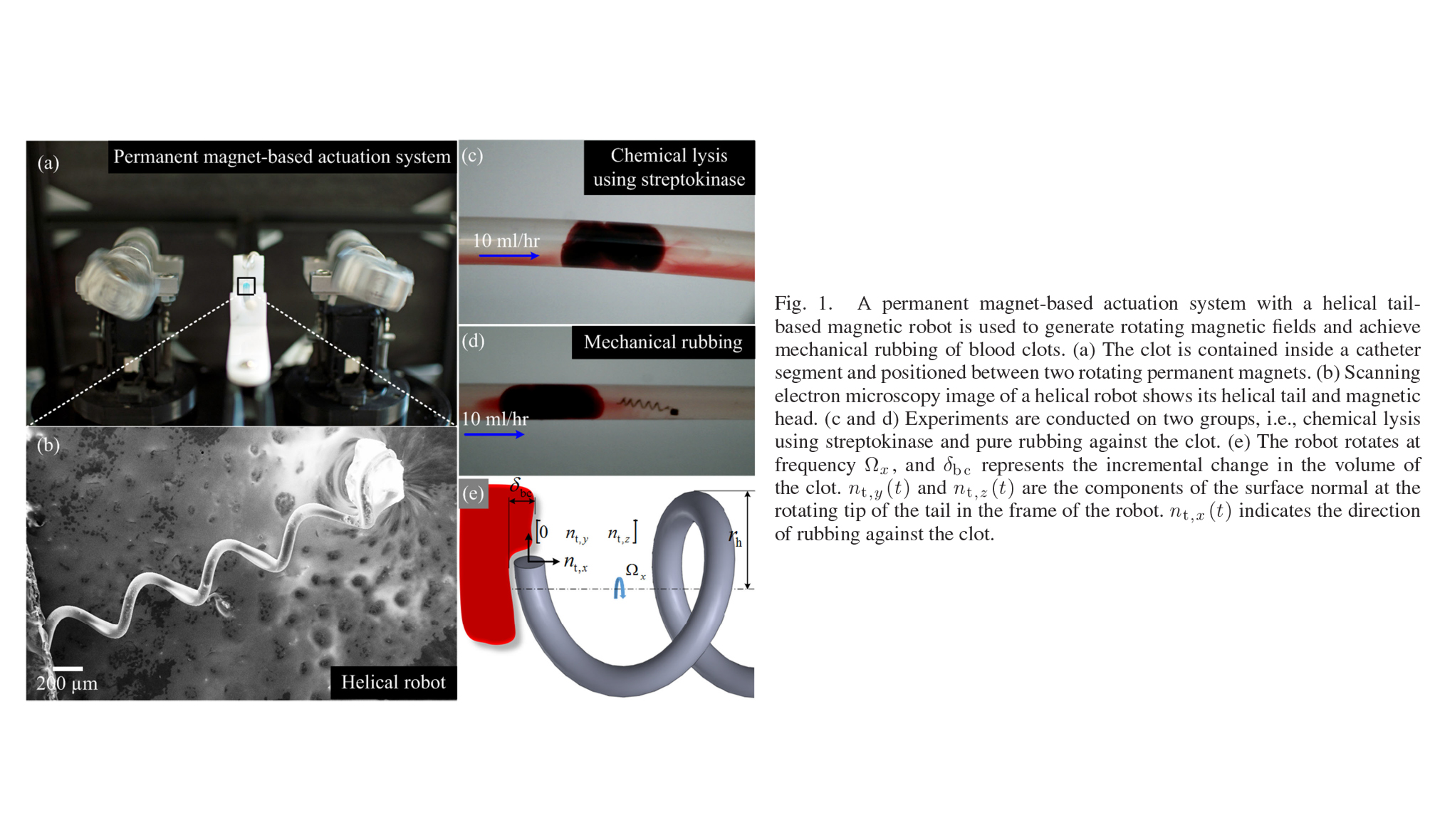
The risk of side effects from thrombolytic agents can be minimized by using smaller doses, assisted by mechanical rubbing against blood clots using helical robots. Quantifying this observation, we study the influence of rubbing against clots on their removal rate in vitro. First, we present a hydrodynamic model of the helical robot based on the resistive-force theory to investigate the rubbing behavior of the clots using robot driven by two rotating dipole fields. Second, we experimentally evaluate the influence of the rubbing on the removal rate of the blood clots. Not only do we find that the removal rate of mechanical rubbing (-0.56 ± 0.27 mm3 /min) is approximately three times greater than the dissolution rate of chemical lysis using streptokinase (-0.17 ± 0.032 mm3/min), but we also show that this removal rate can be controlled via the rubbing speed of the robot.
| Author(s): | Khalil, Islam SM and Tabak, Ahmet Fatih and Sadek, Khaled and Mahdy, Dalia and Hamdi, Nabila and Sitti, Metin |
| Journal: | IEEE Robotics and Automation Letters |
| Volume: | 2 |
| Number (issue): | 2 |
| Pages: | 927--934 |
| Year: | 2017 |
| Department(s): | Physical Intelligence |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1109/LRA.2017.2654546 |
| State: | Published |
|
BibTex @article{khalil2017rubbing,
title = {Rubbing Against Blood Clots Using Helical Robots: Modeling and In Vitro Experimental Validation},
author = {Khalil, Islam SM and Tabak, Ahmet Fatih and Sadek, Khaled and Mahdy, Dalia and Hamdi, Nabila and Sitti, Metin},
journal = {IEEE Robotics and Automation Letters},
volume = {2},
number = {2},
pages = {927--934},
year = {2017},
doi = {10.1109/LRA.2017.2654546}
}
|
|