High-Performance Multiresponsive Paper Actuators
2016
Article
pi
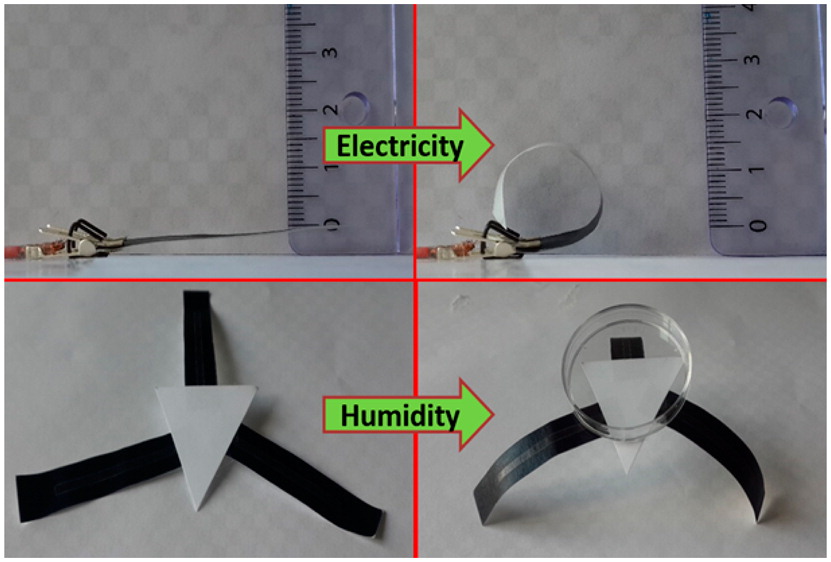
There is an increasing demand for soft actuators because of their importance in soft robotics, artificial muscles, biomimetic devices, and beyond. However, the development of soft actuators capable of low-voltage operation, powerful actuation, and programmable shape-changing is still challenging. In this work, we propose programmable bilayer actuators that operate based on the large hygroscopic contraction of the copy paper and simultaneously large thermal expansion of the polypropylene film upon increasing the temperature. The electrothermally activated bending actuators can function with low voltages (≤ 8 V), low input electric power per area (P ≤ 0.14 W cm–2), and low temperature changes (≤ 35 °C). They exhibit reversible shape-changing behavior with curvature radii up to 1.07 cm–1 and bending angle of 360°, accompanied by powerful actuation. Besides the electrical activation, they can be powered by humidity or light irradiation. We finally demonstrate the use of our paper actuators as a soft gripper robot and a lightweight paper wing for aerial robotics.
| Author(s): | Amjadi, Morteza and Sitti, Metin |
| Journal: | ACS Nano |
| Volume: | 10 |
| Number (issue): | 11 |
| Pages: | 10202--10210 |
| Year: | 2016 |
| Department(s): | Physical Intelligence |
| Research Project(s): |
High-performance multiresponsive paper actuators
Parallel microcracks-based ultrasensitive and highly stretchable strain sensors |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1021/acsnano.6b05545 |
|
BibTex @article{amjadi2016high,
title = {High-Performance Multiresponsive Paper Actuators},
author = {Amjadi, Morteza and Sitti, Metin},
journal = {ACS Nano},
volume = {10},
number = {11},
pages = {10202--10210},
year = {2016},
doi = {10.1021/acsnano.6b05545}
}
|
|