2024
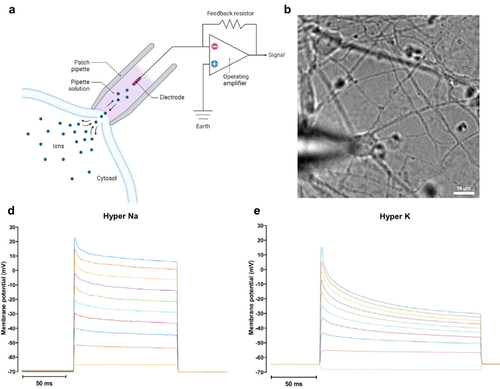
A simple quantitative model of neuromodulation, Part I: Ion flow through neural ion channels
Werneck, L., Han, M., Yildiz, E., Keip, M., Sitti, M., Ortiz, M.
Journal of the Mechanics and Physics of Solids, 182, pages: 105457, 2024 (article)
Nanodiamond-Enhanced Magnetic Resonance Imaging
Jelena Lazovic, E. G. A. W. P. S. A. S. J. L. G. W. M. S.
Advanced Materials, 36(11):2310109, 2024 (article)
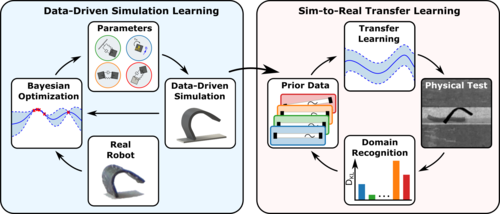
Learning Soft Millirobot Multimodal Locomotion with Sim-to-Real Transfer
Demir, S. O., Tiryaki, M. E., Karacakol, A. C., Sitti, M.
Advanced Science, 2024 (article)
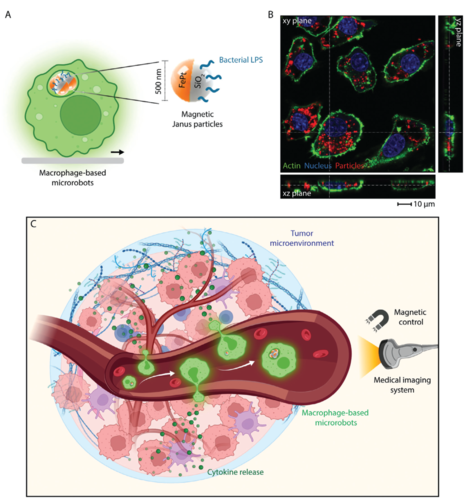
Immune Cell‐Based Microrobots for Remote Magnetic Actuation, Antitumor Activity, and Medical Imaging
Dogan, N. O., Suadiye, E., Wrede, P., Lazovic, J., Dayan, C. B., Soon, R. H., Aghakhani, A., Richter, G., Sitti, M.
Advanced Healthcare Materials, pages: 2400711, 2024 (article)
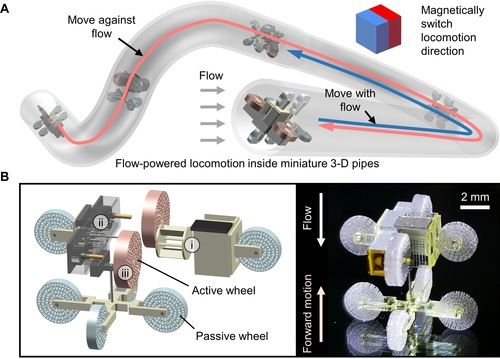
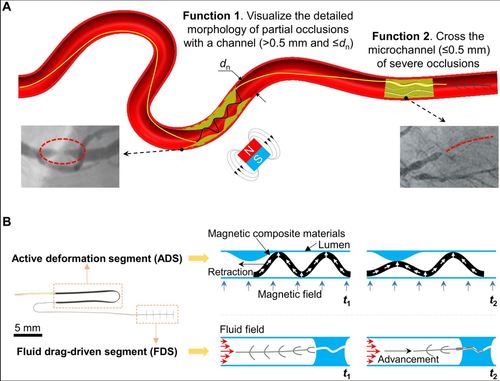
Wireless flow-powered miniature robot capable of traversing tubular structures
Hong, C., Wu, Y., Wang, C., Ren, Z., Wang, C., Liu, Z., Hu, W., Sitti, M.
Science Robotics, 9(88):eadi5155, 2024 (article)
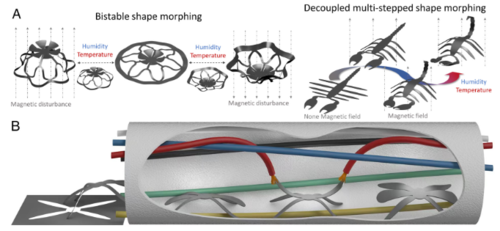
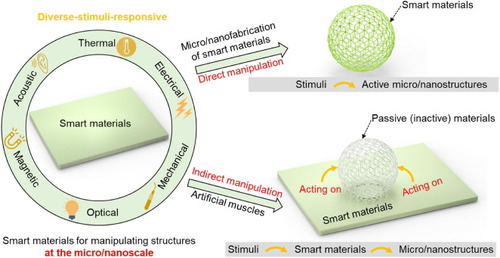
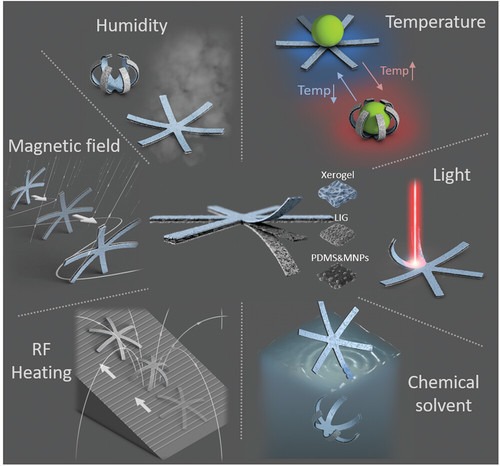
Single-step precision programming of decoupledmultiresponsive soft millirobots
Zheng, Z., Han, J., Shi, Q., Demir, S. O., Jiang, W., Sitti, M.
PNAS, 121, 2024 (article)
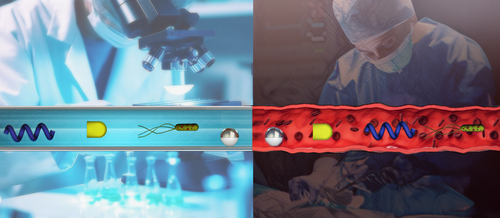
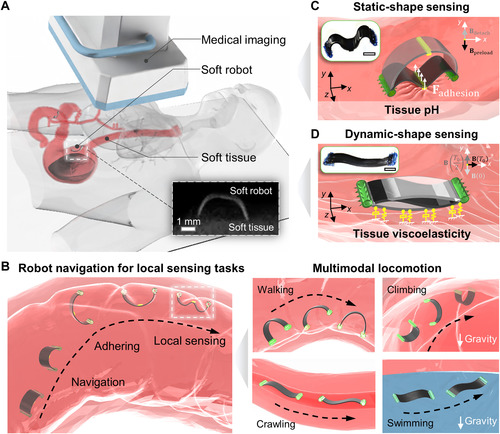
Clinical translation of wireless soft robotic medical devices
Wang, T., Wu, Y., Yildiz, E., Kanyas, S., Sitti, M.
Nature Reviews Bioengineering, 2024 (article)
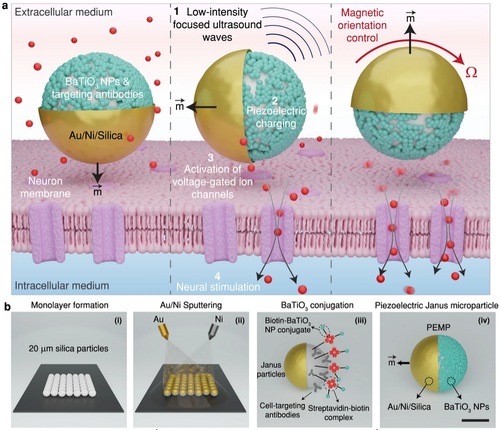
Janus microparticles-based targeted and spatially-controlled piezoelectric neural stimulation via low-intensity focused ultrasound
Han, M., Yildiz, E., Bozuyuk, U., Aydin, A., Yu, Y., Bhargava, A., Karaz, S., Sitti, M.
Nature Communications, 15(1):2013, 2024 (article)
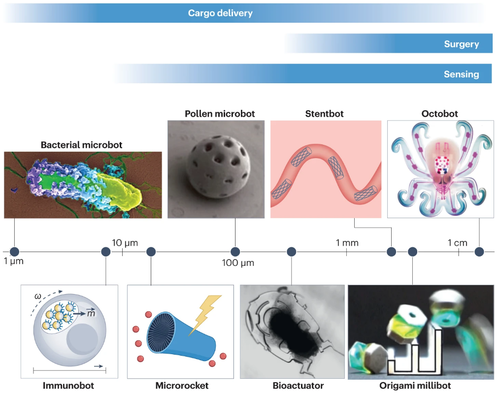
Roadmap for Clinical Translation of Mobile Microrobotics
Bozuyuk, U., Wrede, P., Yildiz, E., Sitti, M.
Advanced Materials, 2311462, 2024 (article)
2023
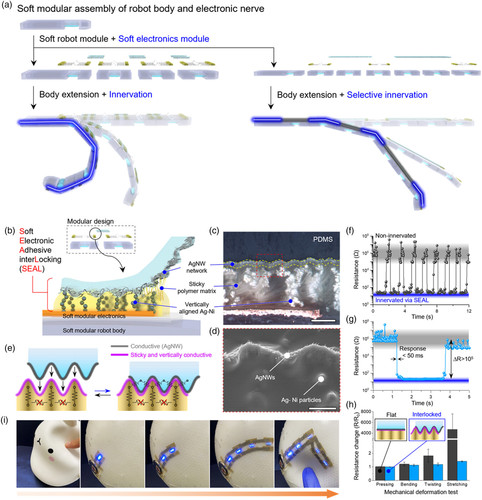
Reconfigurable Innervation of Modular Soft Machines via Soft, Sticky, and Instant Electronic Adhesive Interlocking
Yoon, J., Byun, J., Park, M., Kim, H., Kim, W., Yoon, J., Cho, K., Hong, Y.
Advanced Intelligent Systems, 5(8), August 2023 (article)
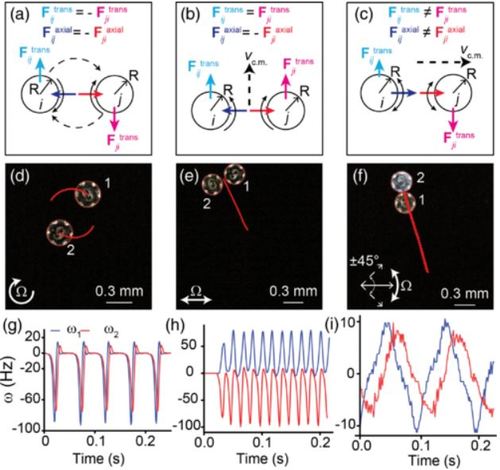
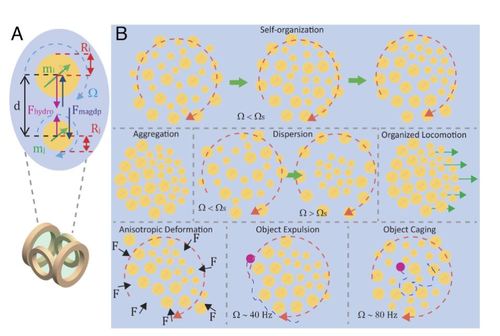
Swarming magnetic surface microrollers enable directed locomotion in circular confinements
Electrodeposited Superhydrophilic-Superhydrophobic Composites for Untethered Multi-Stimuli-Responsive Soft Millirobots
Zheng, Z., Han, J., Demir, S. O., Wang, H., Jiang, W., Liu, H., Sitti, M.
Advanced Science, pages: 2302409, June 2023 (article)
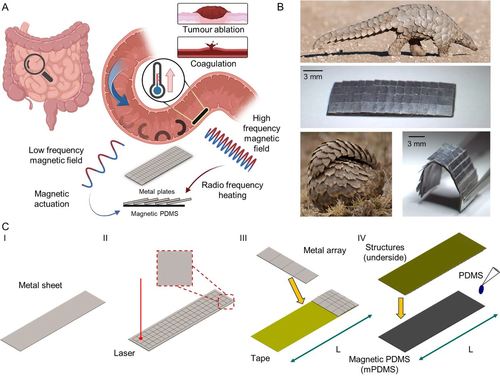
Pangolin-inspired untethered magnetic robot for on-demand biomedical heating applications
Soon, R. H., Yin, Z., Dogan, M. A., Dogan, N. O., Tiryaki, M. E., Karacakol, A. C., Aydin, A., Esmaeili-Dokht, P., Sitti, M.
Nature Communications, 14(1):3320, June 2023 (article)
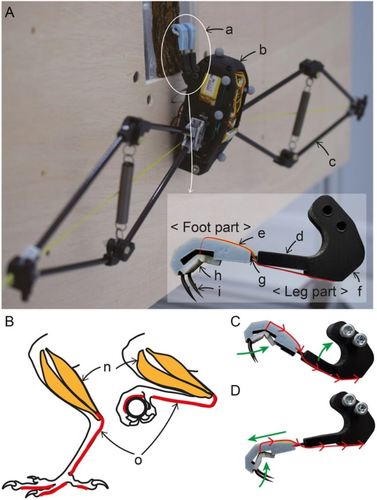
Avian-Inspired Perching Mechanism for Jumping Robots
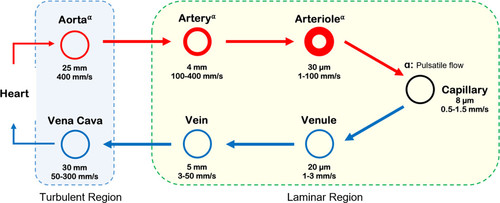
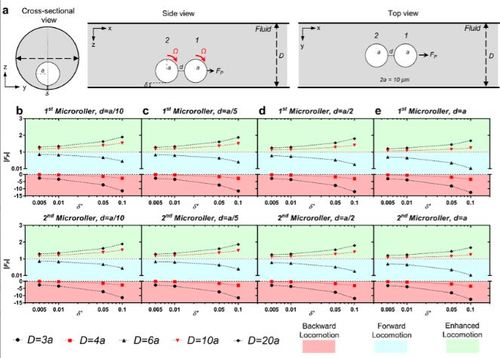
Microrobotic Locomotion in Blood Vessels: A Computational Study on the Performance of Surface Microrollers in the Cardiovascular System
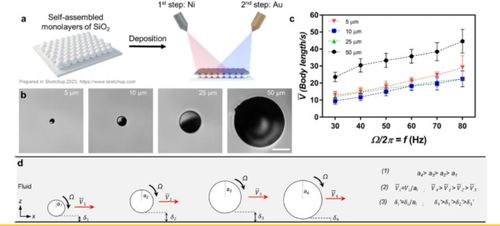
The mismatch between experimental and computational fluid dynamics analyses for magnetic surface microrollers
Bozuyuk, U., Ozturk, H., Sitti, M.
Scientific Reports, 13(1):10196, June 2023 (article)
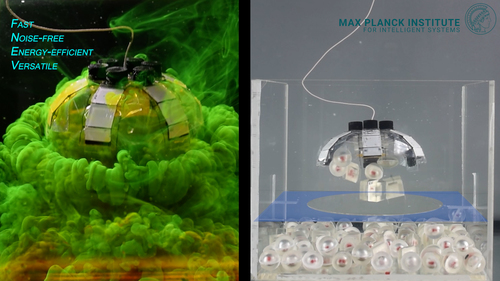
A Versatile Jellyfish-Like Robotic Platform for Effective Underwater Propulsion and Manipulation
Wang, T., Joo, H., Song, S., Hu, W., Keplinger, C., Sitti, M.
Science Advances, 9(15), American Association for the Advancement of Science, April 2023, Tianlu Wang and Hyeong-Joon Joo contributed equally to this work. (article)

Hygroscopic Materials
Guo, S., De Wolf, S., Sitti, M., Serre, C., Tan, S. C.
Advanced Materials, 36(12), Wiley, Weinheim, March 2023 (article)
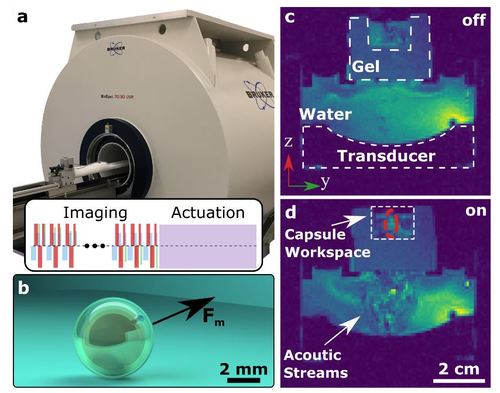
MRI-powered Magnetic Miniature Capsule Robot with HIFU-controlled On-demand Drug Delivery
Tiryaki, M. E., Dogangun, F., Dayan, C. B., Wrede, P., Sitti, M.
arXiv preprint arXiv:2301.07197, 2023 (article)
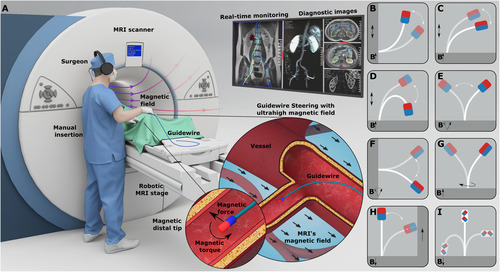
Magnetic guidewire steering at ultrahigh magnetic fields
Tiryaki, M. E., Elmacıoğlu, Y. G., Sitti, M.
Science Advances, 9(17):eadg6438, 2023 (article)
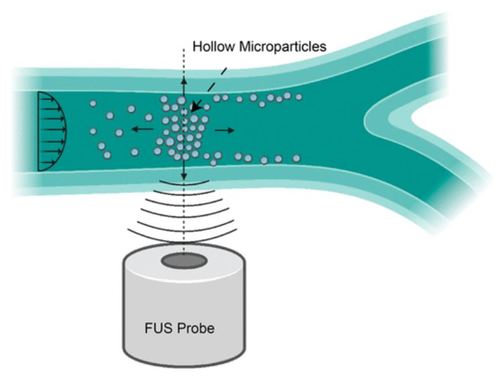
Acoustic Trapping and Manipulation of Hollow Microparticles under Fluid Flow Using a Single-Lens Focused Ultrasound Transducer
Wrede, P., Aghakhani, A., Bozuyuk, U., Yildiz, E., Sitti, M.
ACS Applied Materials \& Interfaces, 15(45):52224-52236, 2023 (article)
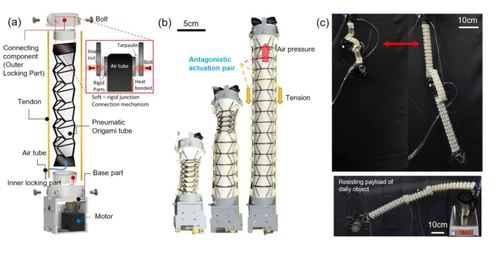
Deployable Soft Origami Modular Robotic Arm With Variable Stiffness Using Facet Buckling
Park, M., Kim, W., Yu, S., Cho, J., Kang, W., Byun, J., Jeong, U., Cho, K.
IEEE Robotics and Automation Letters, 8(2):864-871, 2023 (article)
Carrier, use of a carrier, method of activating a carrier and method of making a carrier
Machine Learning-Based Shear Optimal Adhesive Microstructures with Experimental Validation
Dayan, C. B., Son, D., Aghakhani, A., Wu, Y., Demir, S. O., Sitti, M.
Small, pages: 2304437, 2023 (article)
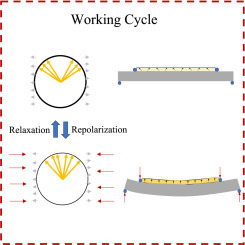
A ferroelectric/ferroelastic energy harvester: Load impedance and frequency effects
Kang, W., Cain, C., Paynter, R., Huber, J. E.
Energy Conversion and Management, 277, 2023 (article)
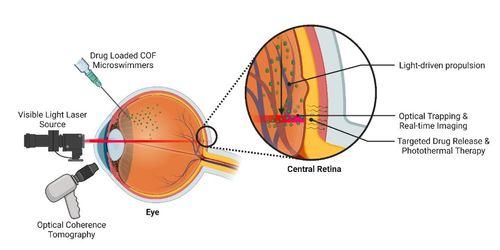
Designing Covalent Organic Framework-based Light-driven Microswimmers towards Intraocular Theranostic Applications
Sridhar, V., Yildiz, E., Rodrı́guez-Camargo, A., Lyu, X., Yao, L., Wrede, P., Aghakhani, A., Akolpoglu, M. B., Podjaski, F., Lotsch, B. V., Sitti, M.
Advanced Materials, 35(25), 2023 (article)
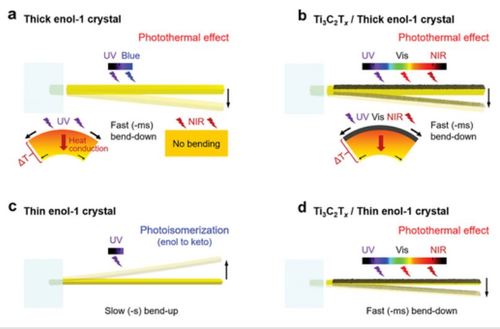
Broad-Wavelength Light-Driven High-Speed Hybrid Crystal Actuators Actuated Inside Tissue-Like Phantoms
Kim, D. W., Hagiwara, Y., Hasebe, S., Dogan, N. O., Zhang, M., Asahi, T., Koshima, H., Sitti, M.
Advanced Functional Materials, 33(47):2305916, 2023 (article)
Microrobotic Locomotion in Blood Vessels: A Computational Study on the Performance of Surface Microrollers in the Cardiovascular System
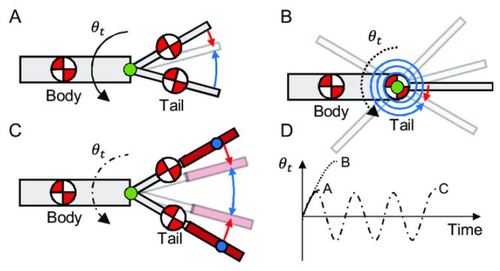
Active Tail Configurations for Enhanced Body Reorientation Performance
Microfibers with mushroom-shaped tips for optimal adhesion
Sitti, M., Aksak, B.
2023, US Patent 11,613,674 (patent)