2022
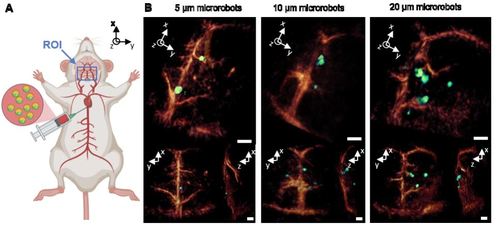
Optoacoustic Tracking and Magnetic Manipulation of Cell-Sized Microrobots in Mice
Wrede, P., Degtyaruk, O., Kalva, S. K., Deán-Ben, X. L., Bozuyuk, U., Aghakhani, A., Akolpoglu, B., Sitti, M., Razansky, D.
Clinical and Translational Biophotonics, pages: TTu4B-6, 2022 (conference)
2021

Method of making one or more fibrils, computer implemented method of simulating an adhesive force of one or more fibrils and fibril

Scientific Report 2016 - 2021
2020
Learning of sub-optimal gait controllers for magnetic walking soft millirobots
Culha, U., Demir, S. O., Trimpe, S., Sitti, M.
In Robotics: Science and Systems XVI, pages: P070, (Editors: Toussaint, Marc and Bicchi, Antonio and Hermans, Tucker), RSS Foundation, Robotics: Science and Systems 2020 (RSS 2020), 2020 (inproceedings)
Towards 5-DoF control of an untethered magnetic millirobot via MRI gradient coils
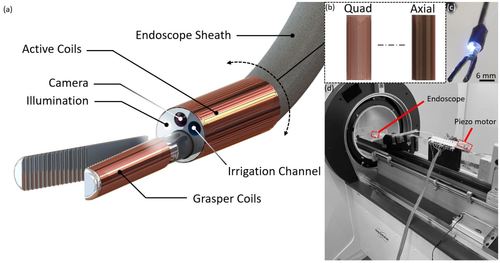
Design and Development of a Lorentz Force-Based MRI-Driven Neuroendoscope
Phelan III, M. F., Dogan, N. O., Lazovic, J., Sitti, M.
In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 9534-9541, 2020 (inproceedings)
2019
Collective formation and cooperative function of a magnetic microrobotic swarm
A magnetically-actuated untethered jellyfish-inspired soft milliswimmer
(Best Paper Award)
Robotics: Science and Systems, June 2019 (conference)
Wide range-sensitive, bending-insensitive pressure detection and application to wearable healthcare device
Kim, S., Amjadi, M., Lee, T., Jeong, Y., Kwon, D., Kim, M. S., Kim, K., Kim, T., Oh, Y. S., Park, I.
In 2019 20th International Conference on Solid-State Sensors, Actuators and Microsystems & Eurosensors XXXIII (TRANSDUCERS & EUROSENSORS XXXIII), 2019 (inproceedings)

Scientific Report 2016 - 2018
Printing-while-moving: a new paradigm for large-scale robotic 3D printing
Tiryaki, M. E., Zhang, X., Pham, Q.
2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019), pages: 2286-2291 , IEEE, Piscataway, NJ, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019), 2019 (conference)
A bio-inspired robotic fish fin with mechanosensation using conductive liquid-metal-infused soft actuators
Liu, Z., Sun, W., Ren, Z., Hu, K., Wang, T., Wen, L.
2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER 2019), pages: 689-694, IEEE, Piscataway, NJ, IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER 2019) , 2019 (conference)
2018
Enhanced non-steady gliding performance of the MultiMo-Bat through optimal airfoil configuration and control strategy
Collectives of spinning mobile microrobots for navigation and object manipulation at the air-water interface
Wang, W., Kishore, V., Koens, L., Lauga, E., Sitti, M.
In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 1-9, 2018 (inproceedings)
Endo-VMFuseNet: A deep visual-magnetic sensor fusion approach for endoscopic capsule robots
Turan, M., Almalioglu, Y., Gilbert, H. B., Sari, A. E., Soylu, U., Sitti, M.
In 2018 IEEE International Conference on Robotics and Automation (ICRA), pages: 1-7, 2018 (inproceedings)
Endosensorfusion: particle filtering-based multi-sensory data fusion with switching state-space model for endoscopic capsule robots
Turan, M., Almalioglu, Y., Gilbert, H., Araujo, H., Cemgil, T., Sitti, M.
In 2018 IEEE International Conference on Robotics and Automation (ICRA), pages: 1-8, 2018 (inproceedings)
2017
Swimming in low reynolds numbers using planar and helical flagellar waves
Khalil, I. S. M., Tabak, A. F., Seif, M. A., Klingner, A., Adel, B., Sitti, M.
In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 1907-1912, International Conference on Intelligent Robots and Systems, September 2017 (inproceedings)
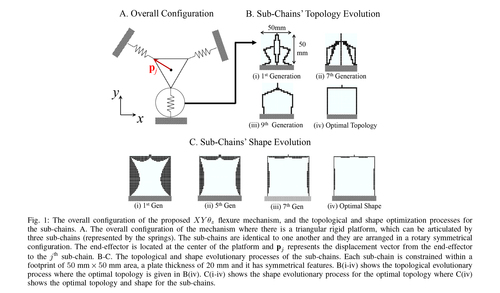
An XY θz flexure mechanism with optimal stiffness properties
Lum, G. Z., Pham, M. T., Teo, T. J., Yang, G., Yeo, S. H., Sitti, M.
In 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), pages: 1103-1110, July 2017 (inproceedings)
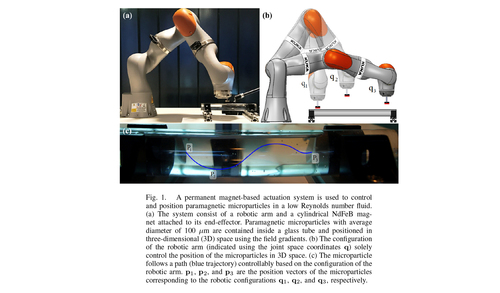
Positioning of drug carriers using permanent magnet-based robotic system in three-dimensional space
Khalil, I. S. M., Alfar, A., Tabak, A. F., Klingner, A., Stramigioli, S., Sitti, M.
In 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), pages: 1117-1122, July 2017 (inproceedings)
Self-assembly of micro/nanosystems across scales and interfaces
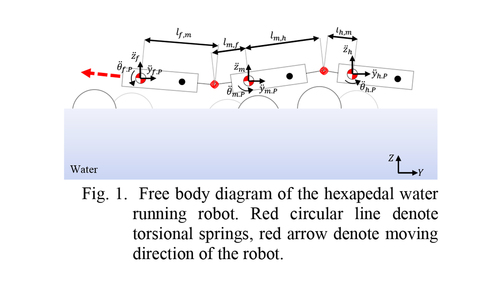
Dynamic analysis on hexapedal water-running robot with compliant joints
Kim, H., Liu, Y., Jeong, K., Sitti, M., Seo, T.
In 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), pages: 250-251, June 2017 (inproceedings)
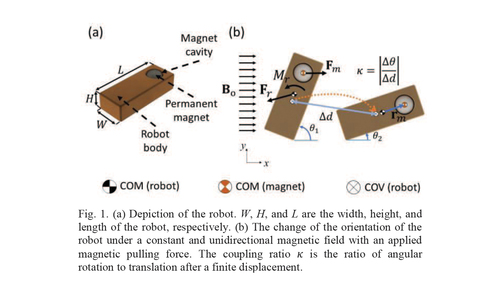
Design and actuation of a magnetic millirobot under a constant unidirectional magnetic field
Erin, O., Giltinan, J., Tsai, L., Sitti, M.
In 2017 IEEE International Conference on Robotics and Automation (ICRA), 2017 IEEE International Conference on Robotics and Automation (ICRA), pages: 3404-3410, IEEE, Piscataway, NJ, USA, IEEE International Conference on Robotics and Automation (ICRA), May 2017 (inproceedings)
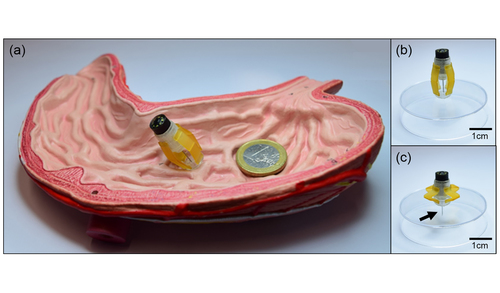
Magnetically actuated soft capsule endoscope for fine-needle aspiration biopsy
Son, D., Dogan, M. D., Sitti, M.
In Proceedings 2017 IEEE International Conference on Robotics and Automation (ICRA), pages: 1132-1139, IEEE, Piscataway, NJ, USA, 2017 IEEE International Conference on Robotics and Automation (ICRA), May 2017 (inproceedings)
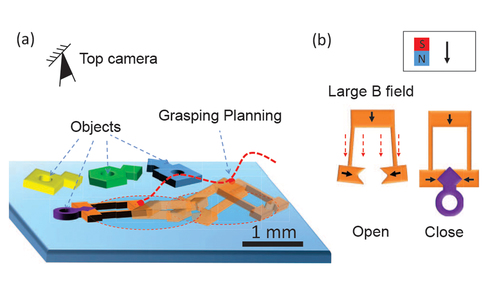
Planning spin-walking locomotion for automatic grasping of microobjects by an untethered magnetic microgripper
2016
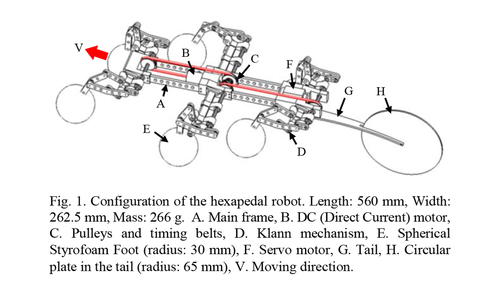
Steering control of a water-running robot using an active tail
Kim, H., Jeong, K., Sitti, M., Seo, T.
In Intelligent Robots and Systems (IROS), 2016 IEEE/RSJ International Conference on, pages: 4945-4950, October 2016 (inproceedings)

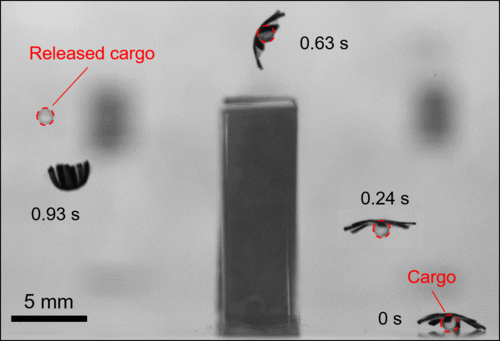
Targeting of cell mockups using sperm-shaped microrobots in vitro
Khalil, I. S., Tabak, A. F., Hosney, A., Klingner, A., Shalaby, M., Abdel-Kader, R. M., Serry, M., Sitti, M.
In 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), pages: 495-501, July 2016 (inproceedings)
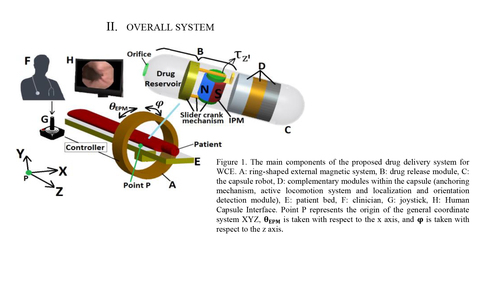
Analysis of the magnetic torque on a tilted permanent magnet for drug delivery in capsule robots
Munoz, F., Alici, G., Zhou, H., Li, W., Sitti, M.
In 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), pages: 1386-1391, July 2016 (inproceedings)
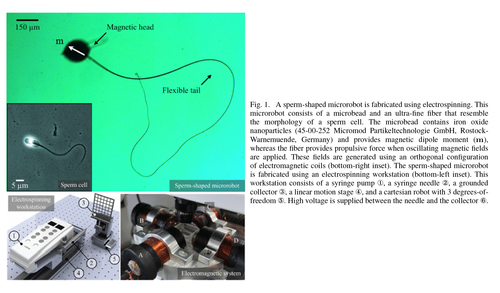
Sperm-shaped magnetic microrobots: Fabrication using electrospinning, modeling, and characterization
Khalil, I. S., Tabak, A. F., Hosney, A., Mohamed, A., Klingner, A., Ghoneima, M., Sitti, M.
In 2016 IEEE International Conference on Robotics and Automation (ICRA), pages: 1939-1944, May 2016 (inproceedings)
Cell patterning in a hydrogel using optically induced dielectrophoresis
Hu, W., Ishii, K., Ohta, A. T.
In Optical MEMS and Nanophotonics (OMN), 2016 International Conference on, pages: 1-2, 2016 (inproceedings)
2015
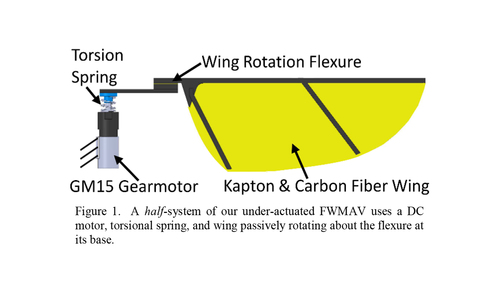
Compliant wing design for a flapping wing micro air vehicle
Colmenares, D., Kania, R., Zhang, W., Sitti, M.
In Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on, pages: 32-39, September 2015 (inproceedings)
Millimeter-scale magnetic swimmers using elastomeric undulations
Zhang, J., Diller, E.
In 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages: 1706-1711, September 2015 (inproceedings)
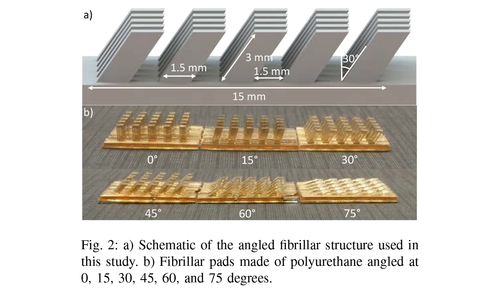
Fiberbot: A miniature crawling robot using a directional fibrillar pad
Han, Y., Marvi, H., Sitti, M.
In Robotics and Automation (ICRA), 2015 IEEE International Conference on, pages: 3122-3127, May 2015 (inproceedings)
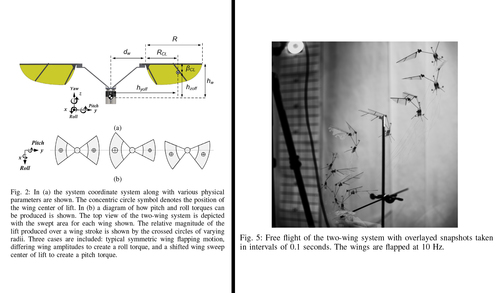
Platform design and tethered flight of a motor-driven flapping-wing system
Hines, L., Colmenares, D., Sitti, M.
In Robotics and Automation (ICRA), 2015 IEEE International Conference on, pages: 5838-5845, May 2015 (inproceedings)
2014
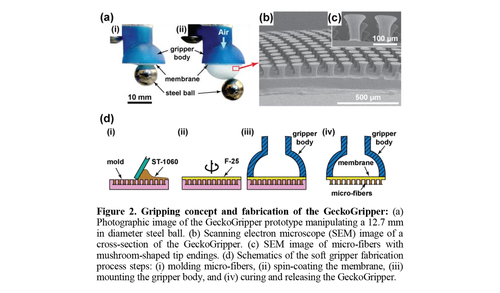
Geckogripper: A soft, inflatable robotic gripper using gecko-inspired elastomer micro-fiber adhesives
Song, S., Majidi, C., Sitti, M.
In Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on, pages: 4624-4629, September 2014 (inproceedings)
Three-dimensional robotic manipulation and transport of micro-scale objects by a magnetically driven capillary micro-gripper
Giltinan, J., Diller, E., Mayda, C., Sitti, M.
In Robotics and Automation (ICRA), 2014 IEEE International Conference on, pages: 2077-2082, 2014 (inproceedings)
Liquid-metal reconfigurable RF components and antennas
Dang, J. H., Morishita, A. M., Gough, R. C., Hu, W., Ohta, A. T., Shiroma, W. A.
In Radio Science Meeting (USNC-URSI NRSM), 2014 United States National Committee of URSI National, pages: 1-1, 2014 (inproceedings)
Robotic assembly of hydrogels for tissue engineering and regenerative medicine
Tasoglu, S, Diller, E, Guven, S, Sitti, M, Demirci, U
In Journal of Tissue Engineering and Regenerative Medicine, 8, pages: 181-182, 2014 (inproceedings)
Molecular delivery and transfection by laser-induced oscillating microbubbles
Fan, Q., Hu, W., Ohta, A. T.
In Nano/Micro Engineered and Molecular Systems (NEMS), 2014 9th IEEE International Conference on, pages: 302-305, 2014 (inproceedings)
Versatile non-contact micro-manipulation method using rotational flows locally induced by magnetic microrobots
Ye, Z., Edington, C., Russell, A. J., Sitti, M.
In Advanced Intelligent Mechatronics (AIM), 2014 IEEE/ASME International Conference on, pages: 26-31, 2014 (inproceedings)
Structural optimization method towards synthesis of small scale flexure-based mobile grippers
Lum, G. Z., Diller, E., Sitti, M.
In Robotics and Automation (ICRA), 2014 IEEE International Conference on, pages: 2339-2344, 2014 (inproceedings)
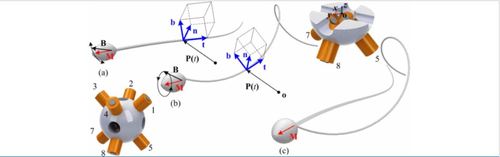
Six-Degrees-of-Freedom Remote Actuation of Magnetic Microrobots.
Diller, E. D., Giltinan, J., Lum, G. Z., Ye, Z., Sitti, M.
In Robotics: Science and Systems, 2014 (inproceedings)
2013
Angular Motion Control Using a Closed-Loop CPG for a Water-Running Robot
Thatte, N., Khoramshahi, M., Ijspeert, A., Sitti, M.
In Dynamic Walking 2013, (EPFL-CONF-199763), 2013 (inproceedings)
A hybrid topological and structural optimization method to design a 3-DOF planar motion compliant mechanism
Lum, G. Z., Teo, T. J., Yang, G., Yeo, S. H., Sitti, M.
In Advanced Intelligent Mechatronics (AIM), 2013 IEEE/ASME International Conference on, pages: 247-254, 2013 (inproceedings)
Light-induced microbubble poration of localized cells
Fan, Qihui, Hu, Wenqi, Ohta, Aaron T
In Engineering in Medicine and Biology Society (EMBC), 2013 35th Annual International Conference of the IEEE, pages: 4482-4485, 2013 (inproceedings)
SoftCubes: towards a soft modular matter
Yim, S., Sitti, M.
In Robotics and Automation (ICRA), 2013 IEEE International Conference on, pages: 530-536, 2013 (inproceedings)
Bubble-driven light-absorbing hydrogel microrobot for the assembly of bio-objects
Hu, W., Fan, Q., Tonaki, W., Ohta, A. T.
In Engineering in Medicine and Biology Society (EMBC), 2013 35th Annual International Conference of the IEEE, pages: 5303-5306, 2013 (inproceedings)
Assembly of cell-laden microgels by an optically controlled bubble manipulator
Hu, W., Fan, Q., Ohta, A.
In International Conference on Miniaturized Systems for Chemistry and Life Sciences, Freiburg, Germany, 2013 (inproceedings)
Three dimensional independent control of multiple magnetic microrobots
Diller, E., Giltinan, J., Jena, P., Sitti, M.
In Robotics and Automation (ICRA), 2013 IEEE International Conference on, pages: 2576-2581, 2013 (inproceedings)
A reconfigurable, liquid-metal-based low-pass filter with reversible tuning
Tonaki, W. G., Hu, W., Ohta, A. T., Shiroma, W. A.
In Wireless Symposium (IWS), 2013 IEEE International, pages: 1-3, 2013 (inproceedings)