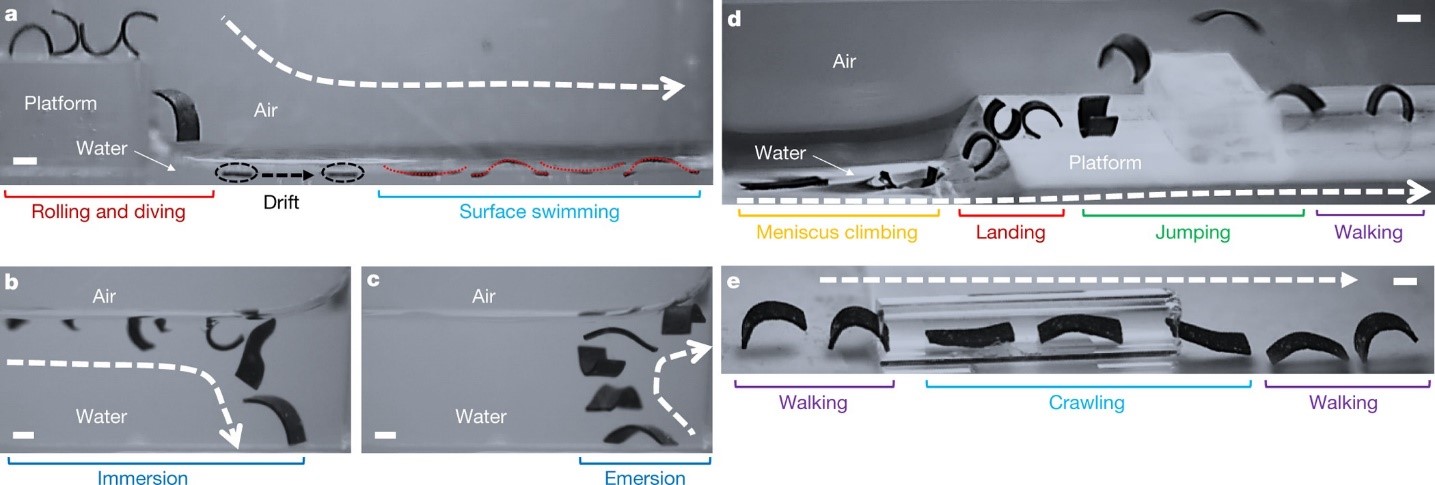
Our multimodal locomotion demonstration using a sheet-shaped soft millirobot moving over diverse liquid and solid environments. A) The soft robot rolls and dives from a solid platform into the adjacent water pool, where it drifts away along the water meniscus. The undulating robot then swims rightwards. B, C) The robot rotates, disengages from the water surface, sinks, and subsequently swims up from the pool bottom to emerge again at the water–air interface. D) The robot climbs up a water meniscus, lands on the solid platform, jumps beyond a standing obstacle, and walks away. E) The robot walks towards a tubular tunnel that impedes its walking gait. The robot then switches to the crawling mode to cross the tunnel, and finally walks away. The locomotion modes were sequentially captured in four separate videos owing to the restrictions of the workspace. Only one robot is used in this illustration. Scale bars: 1 mm.
In previous studies, the shape-programmable magnetic materials have only been programmed for a small number of specific applications, as previous work can only rely on human intuition to approximate the required magnetization profile and actuating magnetic fields for such materials. We proposed a universal programming methodology that can automatically generate the desired magnetization profile and actuating fields for soft materials to achieve desired time-varying shapes. The universality of the proposed method can, therefore, enable other researchers to fully capitalize the potential of shape-programming technologies, allowing them to create a wide range of novel soft active surfaces and devices that are critical in robotics, material science, and medicine [ ].
By using the above methodology, we then addressed a grand challenge facing the existing small-scale robots: multi-locomotion in complex terrains. Previous miniature robots have very limited mobility because they are unable to negotiate obstacles and changes in texture or material in unstructured environments. In our research, we demonstrate magneto-elastic soft millimeter-scale robots that can swim inside and on the surface of liquids, climb liquid menisci, roll and walk on solid surfaces, jump over obstacles, and crawl within narrow tunnels. These robots can transit reversibly between different liquid and solid terrains, as well as switch between locomotive modes. They can additionally execute pick-and-place and cargo-release tasks. The locomotion capability of these robots in fluid-filled confined spaces was particularly investigated as body sites are physically constrained and filled with stagnant (e.g., mucus) or flowing (e.g., blood) biological fluids [ ]. By utilizing the interaction between the dynamic soft-bodied deformation and the surrounding environments, these robots can transit between undulatory crawling mode and the undulatroy swimming mode, and can realize helical surface crawling mode that can go against or withstand the fluid flow in a cylindrical tube. With the in-depth understanding of their locomotion mechanism, we further proposed a series of design and control strategies to enhance their locomotion performance towards different working environments [ ].